Throughout the past 30+ years, we have been constantly pushing technological boundaries. Our mission-critical focus has always given us a sense of urgency to make our technology lighter, faster, smarter, and more flexible.
We were among the first to craft a solution for handling large amounts of geographic data, allowing you to run it on a PC rather than dedicated graphical workstations. This innovation opened up entirely new potential for data flexibility and cost savings. We were also pioneers in the development of emergency response command and control systems by shifting from a text-based workflow to a dynamic map-centric workflow. We make a point of fostering a spirit of innovation throughout our company, achieved through openness, experimentation, diligence and support. Not to mention welcoming inspiration from across the company – from our master’s students for example.
Current and future projects

April 15, 2024
Protecting Airspace through Geospatial Technology Solutions
In Air Defence and Counter-UAS, having a well-protected airspace involves employing a combination of detection, identification, tracking, and interception capabilities to neutralize any potential threats to the airspace’s security and …
February 15, 2024
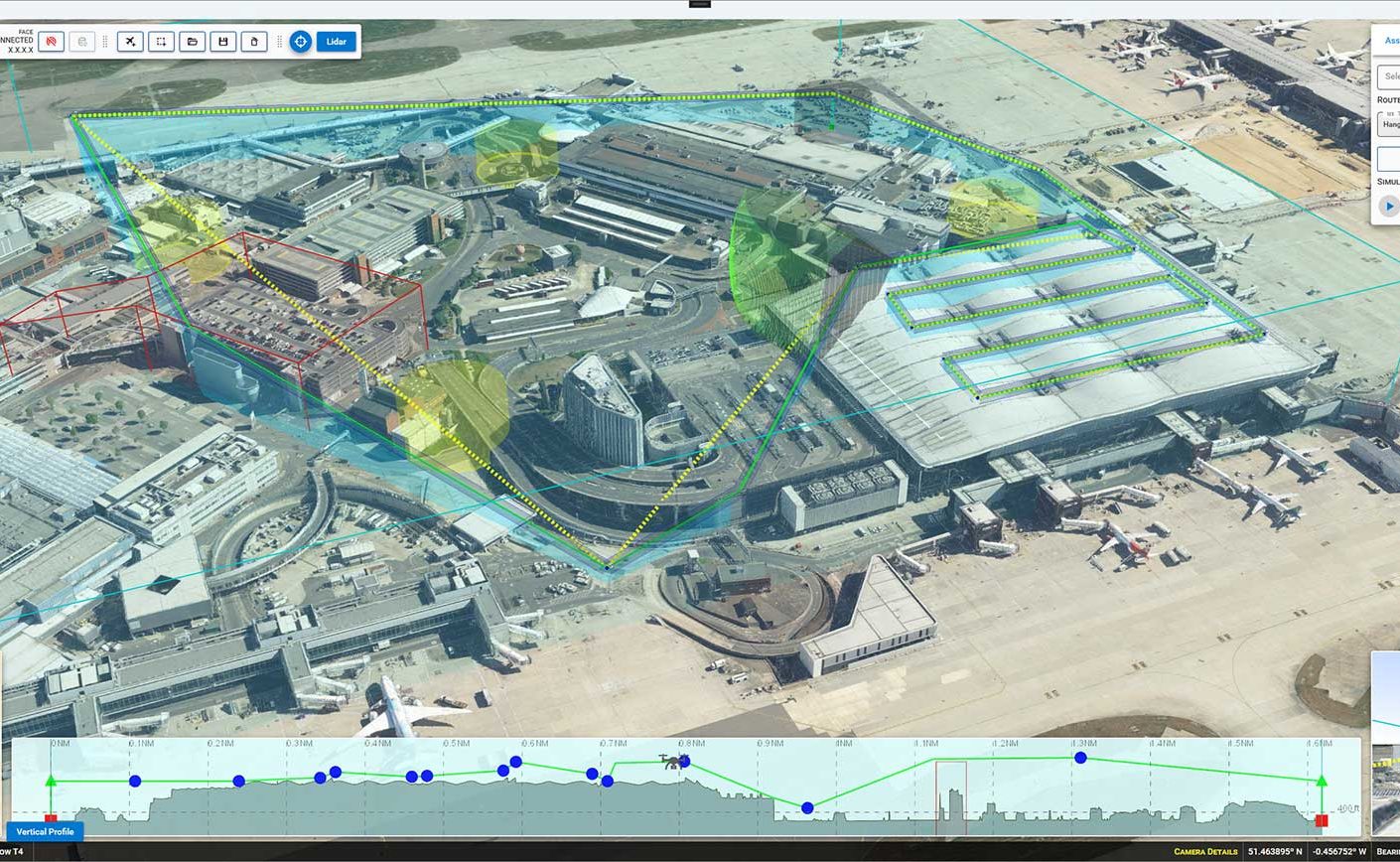
UAS mission planning and deconfliction in BVLOS drone operations
Operating drones in highly congested urban environments is a challenge. To do it beyond visual line of sight (BVLOS) and autonomously, within approved rules but without direct human intervention, is …

May 31, 2022
UAS Safe Landing Zones
Determining safe landing zones is an essential part of many types of UAS missions. Two examples of such UAS missions is delivering supplies to military ops and doing emergency medical …
October 28, 2021
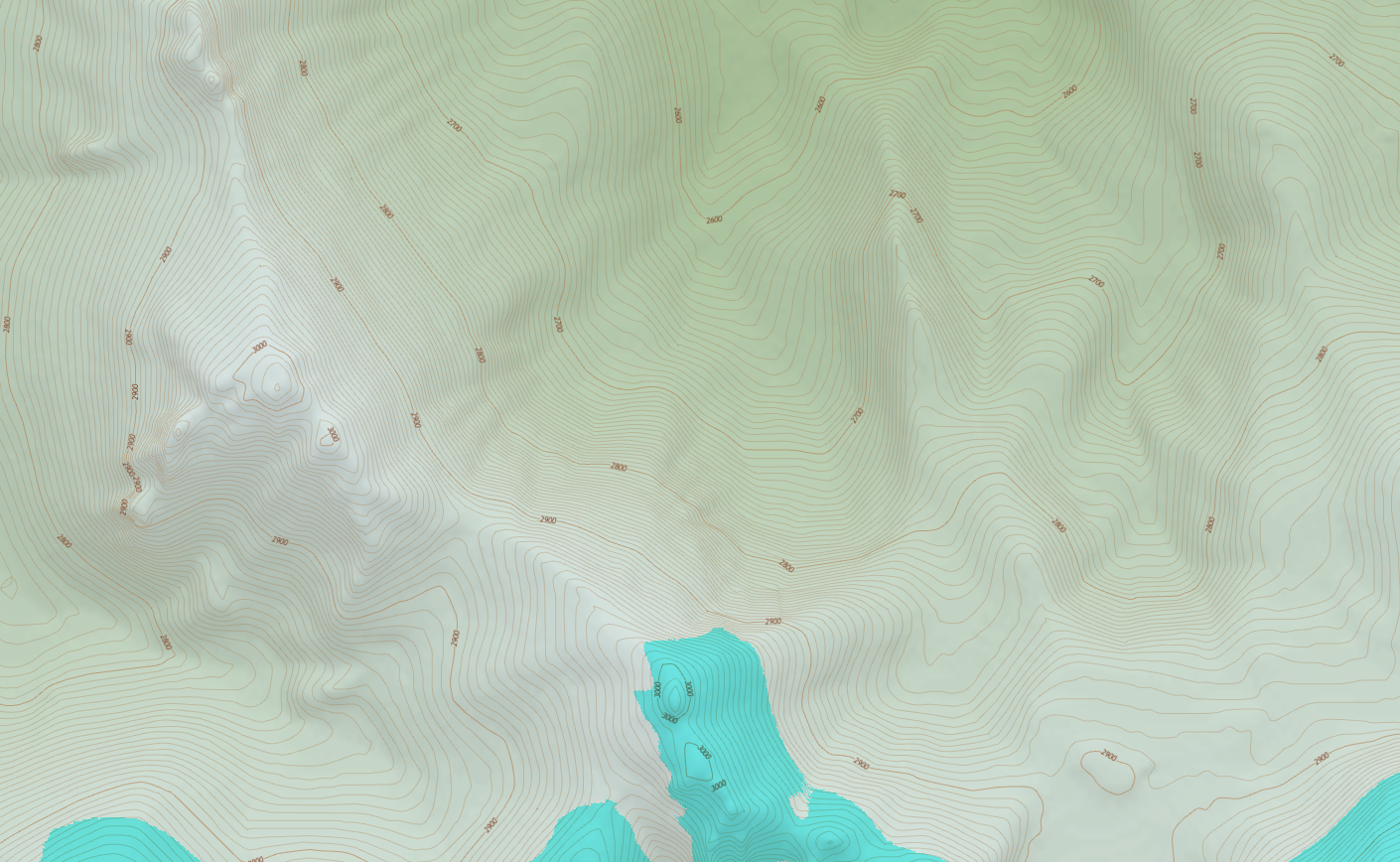
Making visibility visible
Geographical data can be used to create all sorts of map presentations as synthesised representations of reality. Adding analyses to the process can enhance our perception of this reality. Here …
March 23, 2021
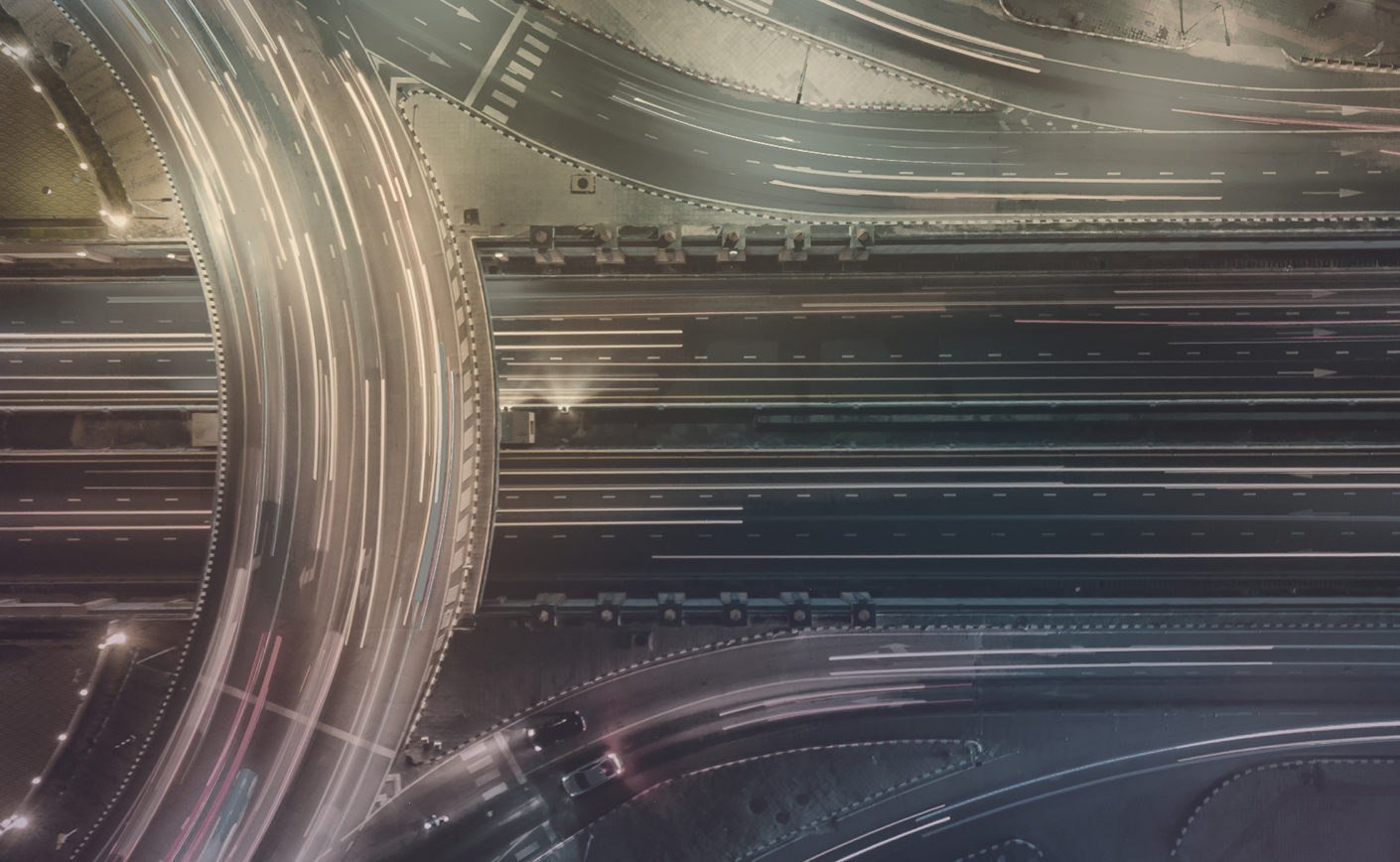
On the right track: Leveraging terrain data for next-level vehicle routing
Solutions for navigating vehicle routes through the leveraging of road data have become more widely available in the last decades, and today most of us have this functionality at our …

November 17, 2020
Master’s Thesis: Multi-objective A* Route Optimization for Terrain Vehicles
Master’s Thesis in cooperation with KTH, the Royal Institute of Technology in Stockholm, Sweden. Background To investigate the extent for which the A* algorithm could find non-dominated routes, A* was …

October 20, 2020
Master’s Thesis: Comparing locking strategies in large highly mutable loose quadtrees
Master’s Thesis in cooperation with KTH, the Royal Institute of Technology in Stockholm, Sweden. Using a quadtree to store points or geometrical shapes in two dimensional environments is a well …
June 1, 2020
Master’s Thesis: Algorithms for Robust Path-Planning
Master’s Thesis in cooperation with Saab AB and Chalmers University of Technology, Gothenburg, Sweden. Background Route optimization is a commonly studied field of optimization resulting in path planning algorithms. In …

February 1, 2020
Master’s Thesis: Early detection of forest fires using deep learning
An increasing wildfire risk is a reality for a big part of the world. Warmer temperatures and drier conditions are the major contributors. The key to control a fire, is …

November 28, 2019
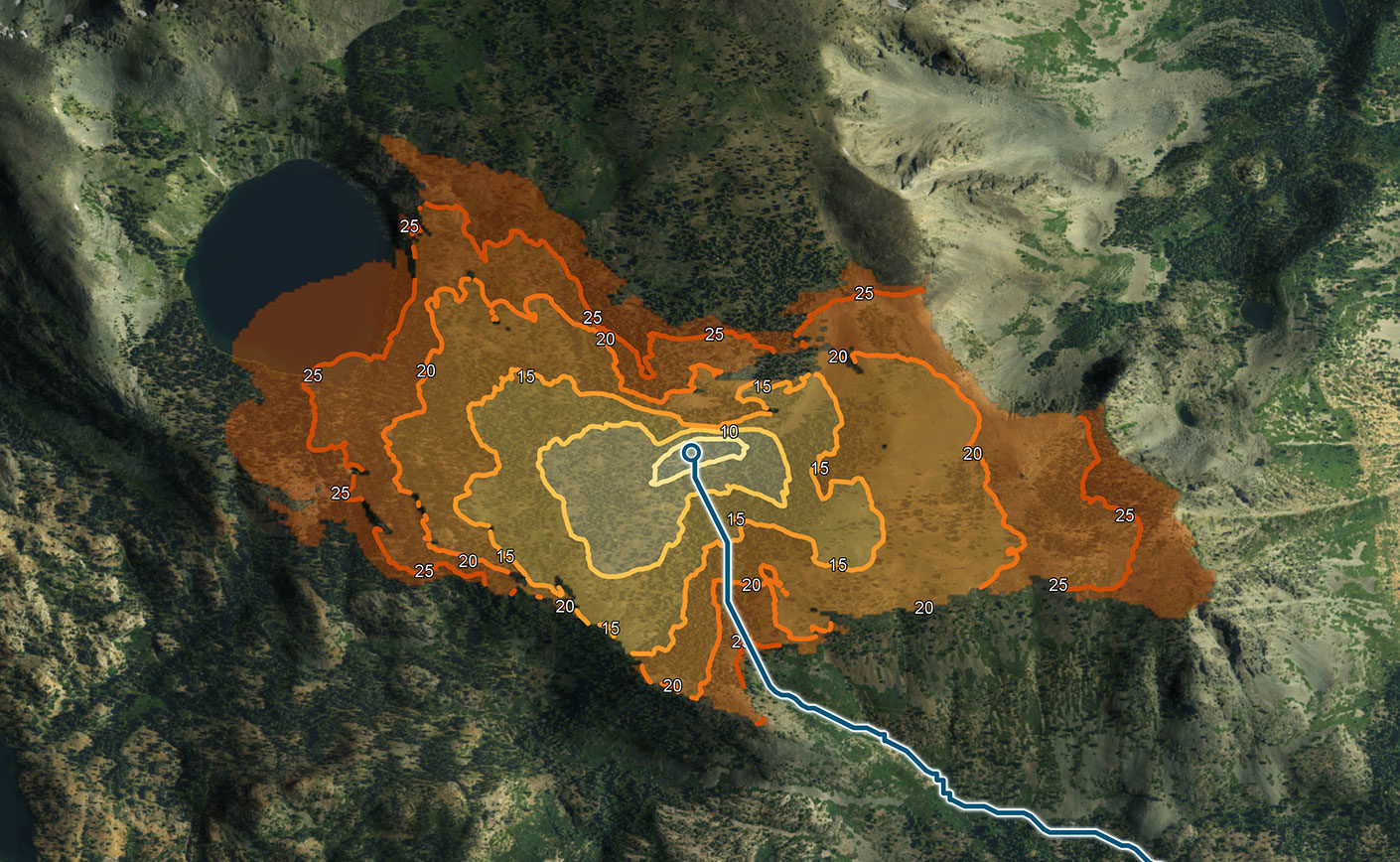
Master’s Thesis: Automated decision support for placing terrain observers
Master’s Thesis in cooperation with KTH, the Royal Institute of Technology in Stockholm, Sweden. Background Access to reliable information is key for military decision-making. Reconnaissance assets are used to gather …

September 25, 2019
Master’s Thesis: Spatial indexing for moving geometry in main memory
Master’s Thesis in cooperation with Chalmers University of Technology, Gothenburg, Sweden. Background Spatial indexes are data structures which store objects in the form of points or geometry in two or …
September 25, 2019
Master’s Thesis: Scene graph memory management
Master’s Thesis in cooperation with Chalmers University of Technology, Gothenburg, Sweden. Background Due to the growing disparity in performance between memory and processors, it is becoming increasingly important to consider …