UAS Safe Landing Zones
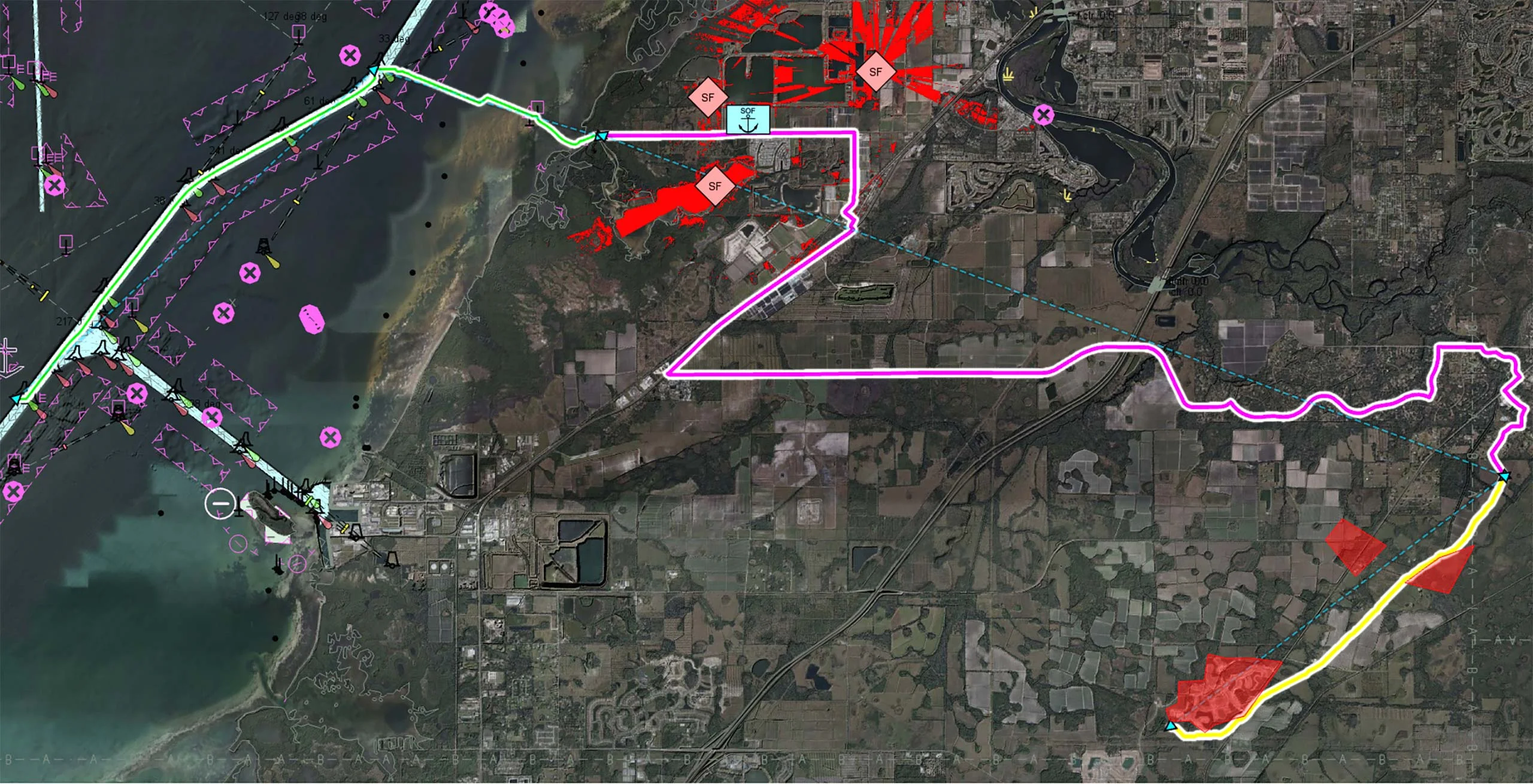
Determining safe landing zones is an essential part of many types of UAS missions. Two examples of such UAS missions is delivering supplies to military ops and doing emergency medical delivery.
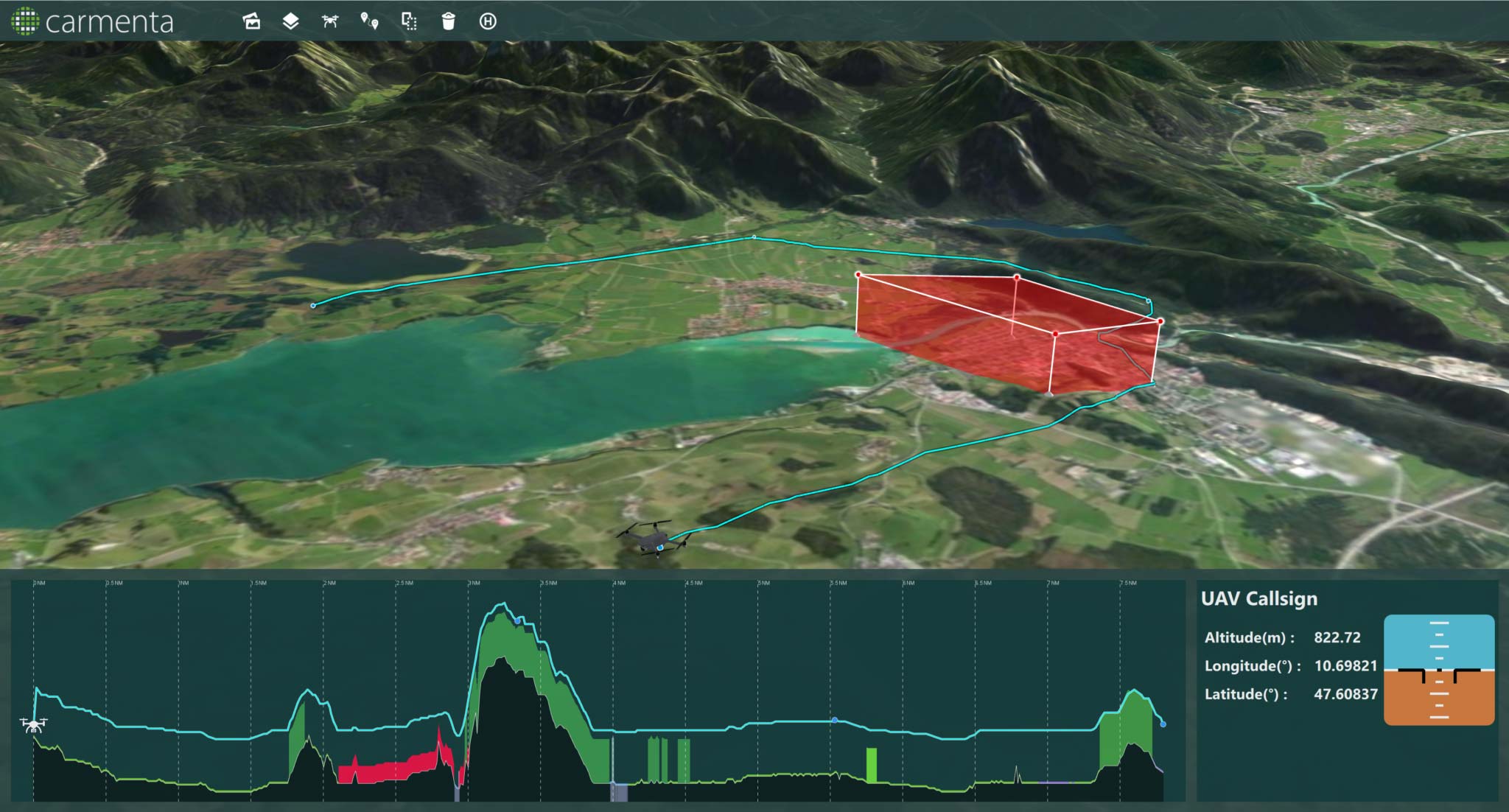
In many cases it is also important to identify safe landing zones along the route in case of an emergency during a flight.

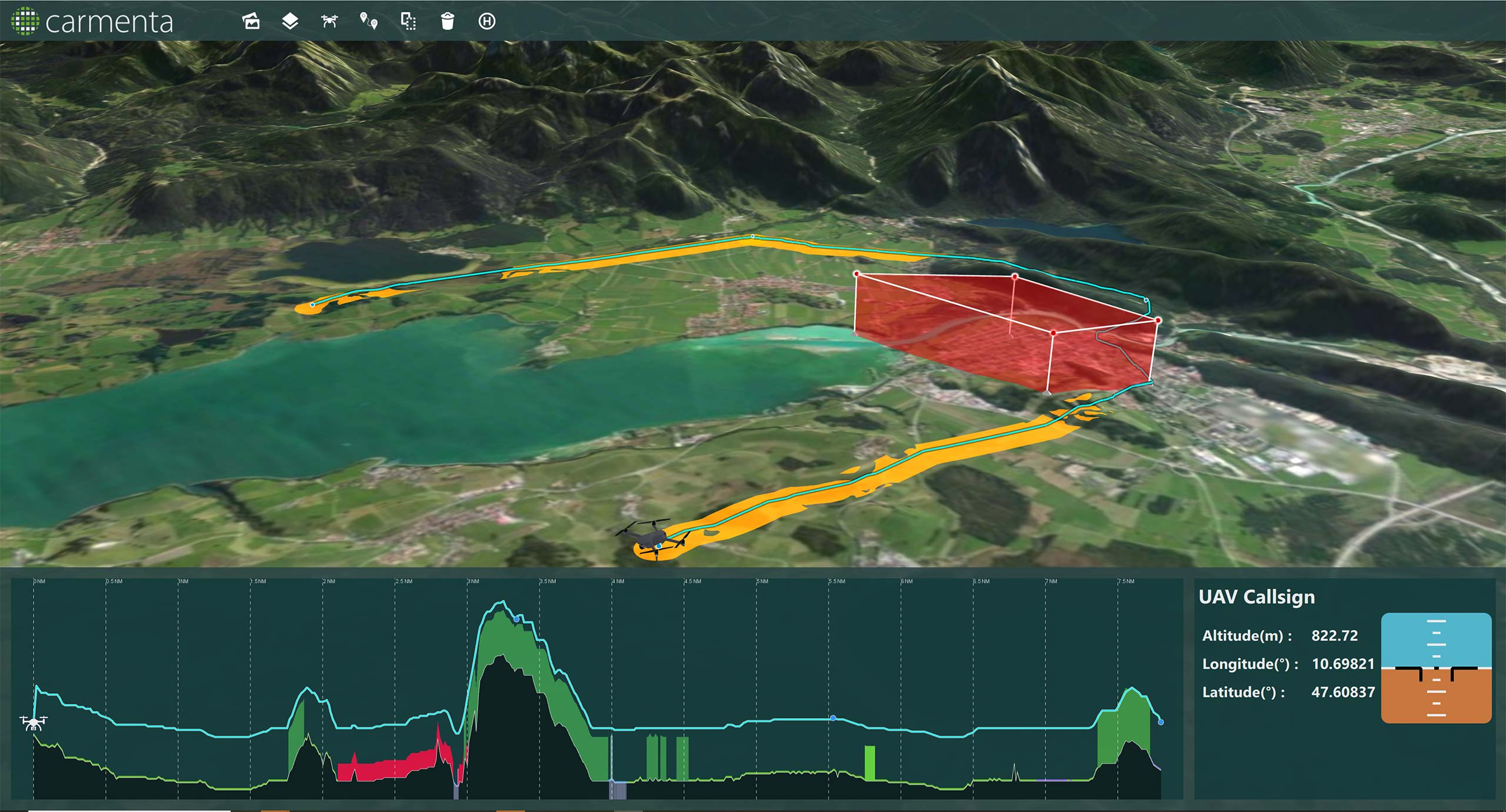
Candidates for safe landing zones can be calculated during the flight planning in the mission preparation. During the flight, sensors and AI signal processing onboard the UAS can be used to evaluate these candidates as well as finding additional safe landing sites.
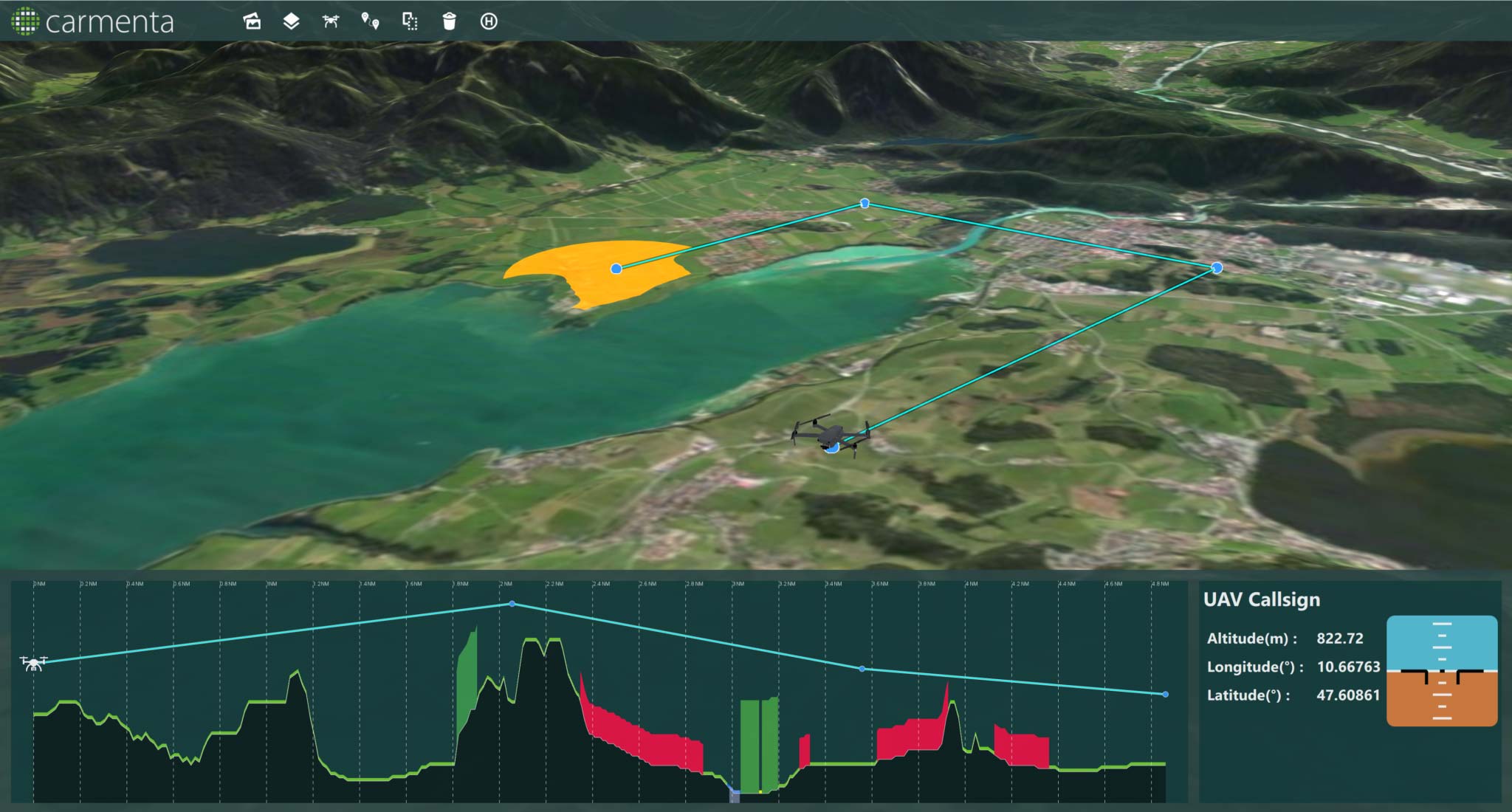
Certain conditions must be met to classify an area as a good candidate as a safe landing site:
- Safely away from hazardous obstructions.
- Suitable based on terrain, land classification (e.g. roads, forest, swamp).
- Reachability with reduced capacity, e.g. the drone unable to climb.
When it comes to preparing the flight for the mission, Carmenta Engine can help the operator to analyze the terrain and identify safe landing zones, so that the drone can start its mission with good candidate areas where it can land safely.