UAS Mission Planning


Mission planning, autonomous execution, and mission data analysis for unmanned vehicles and vessels – for air, land and sea operations.
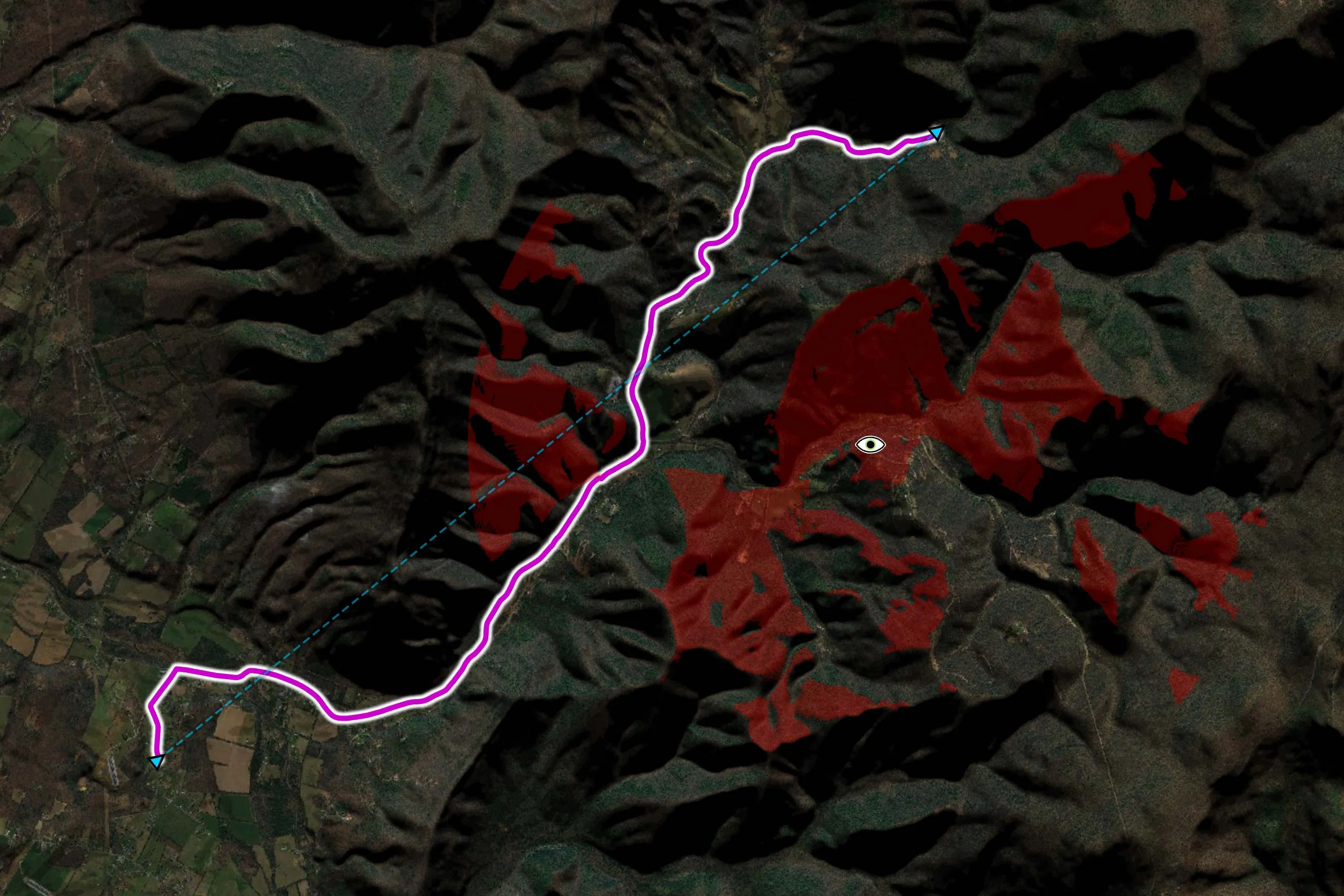
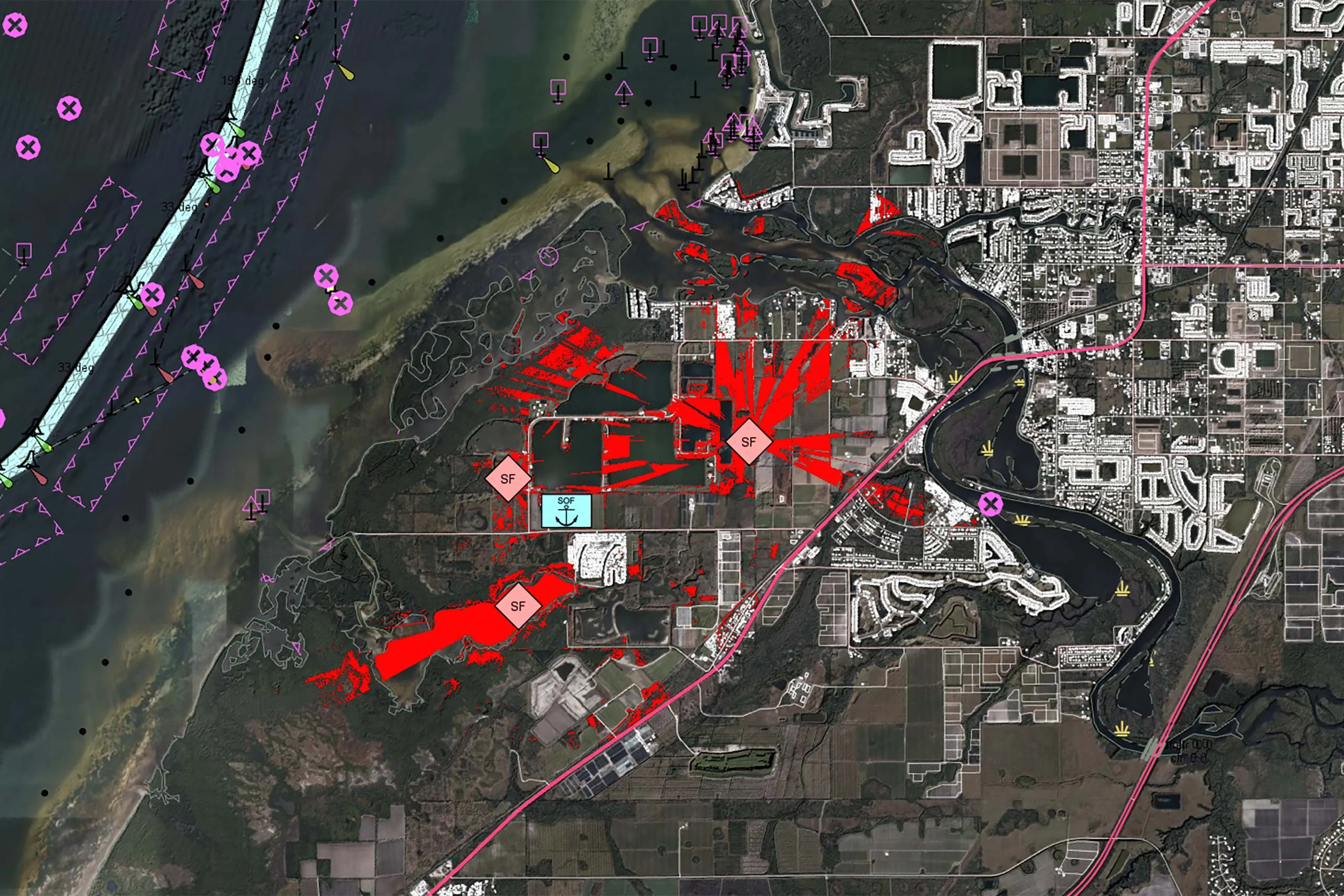
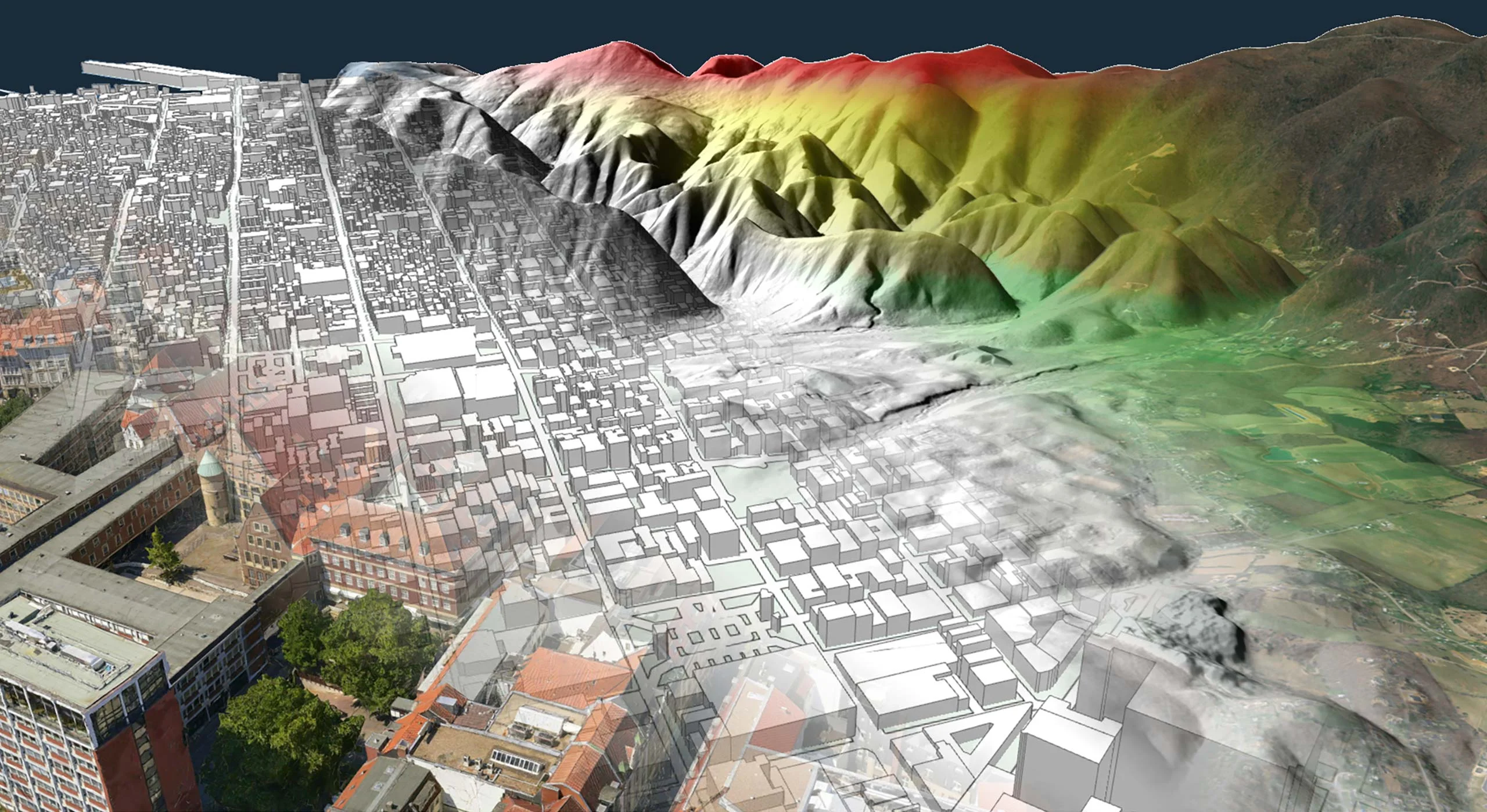
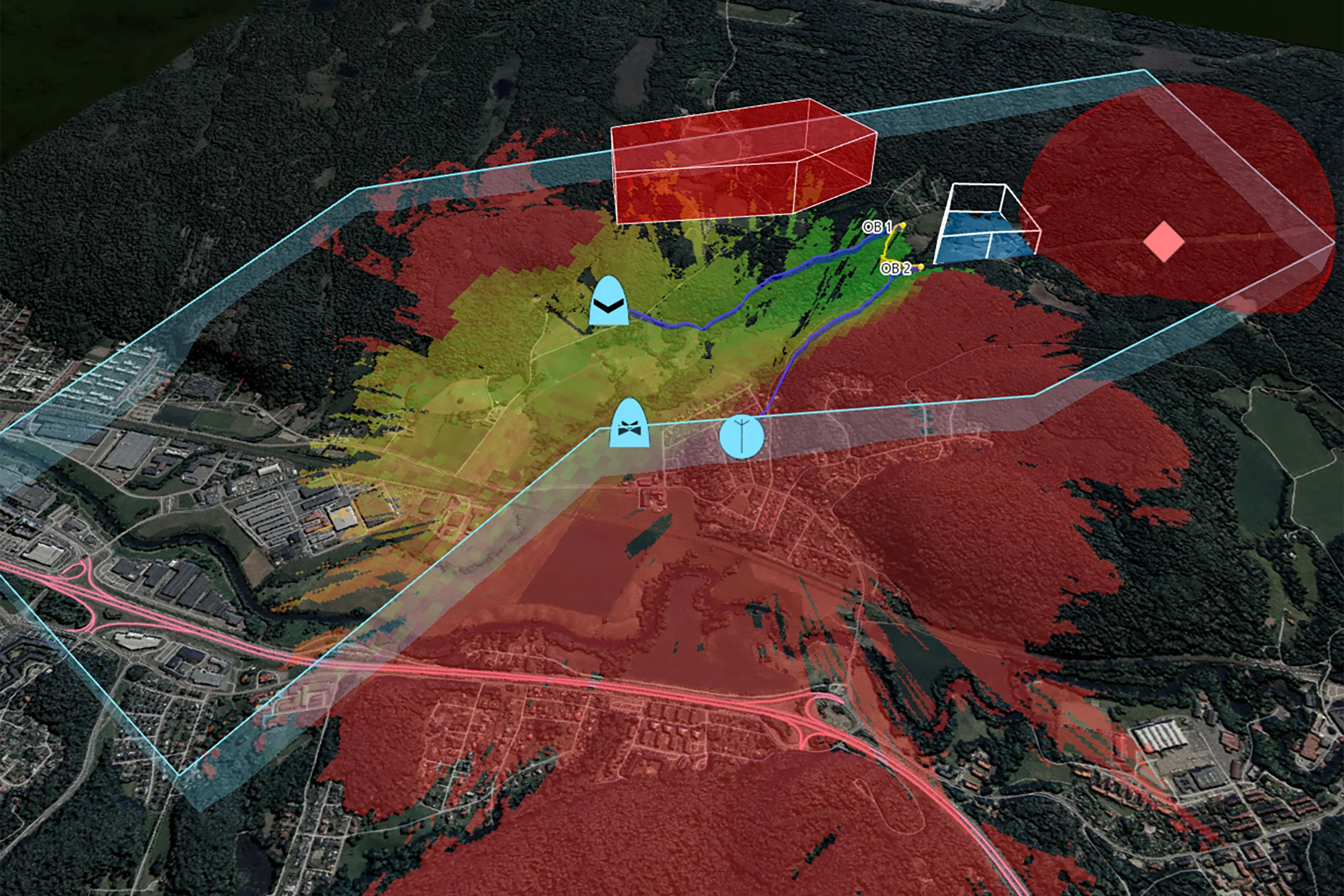
Enhance the predictability and reliability of UAS missions with real-time geospatial analysis, for example to identify optimal observation points.
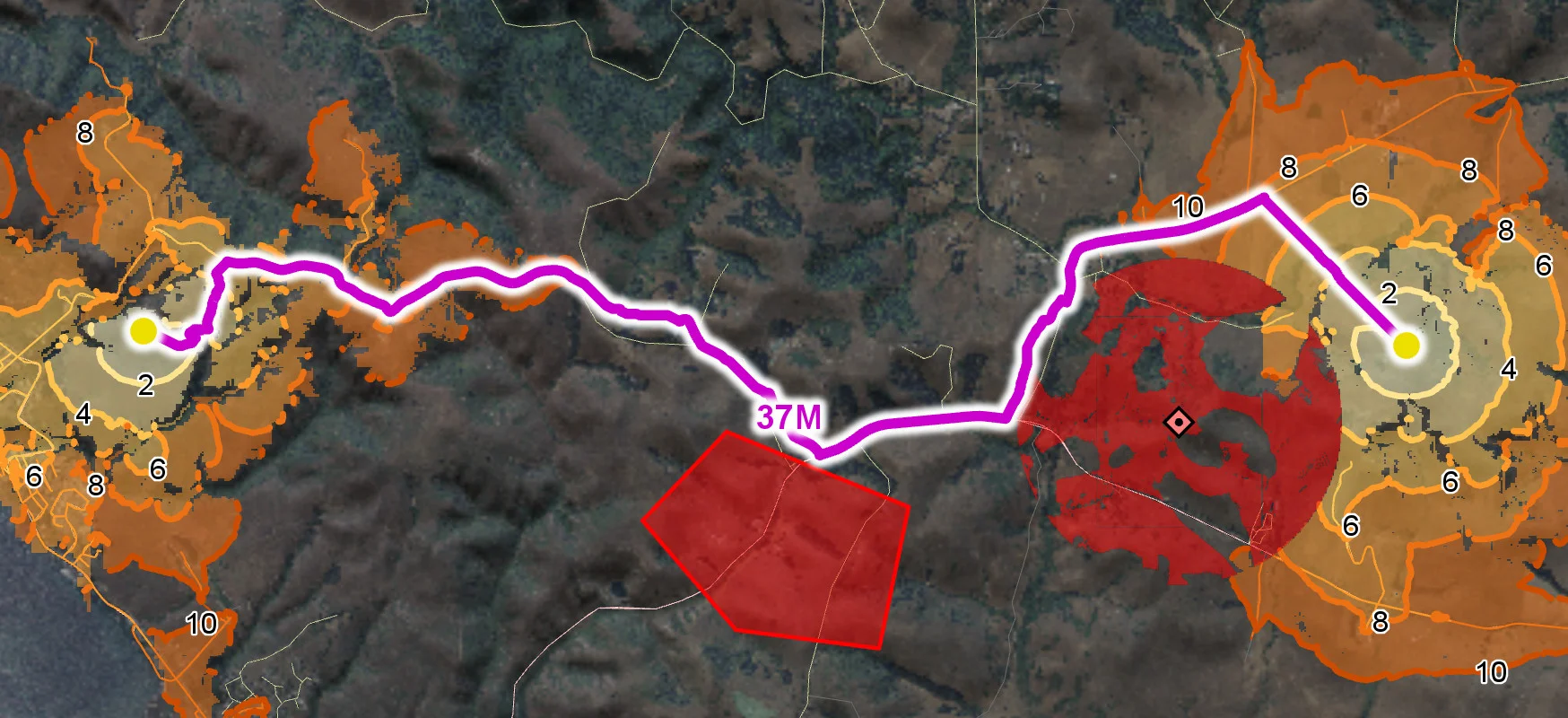
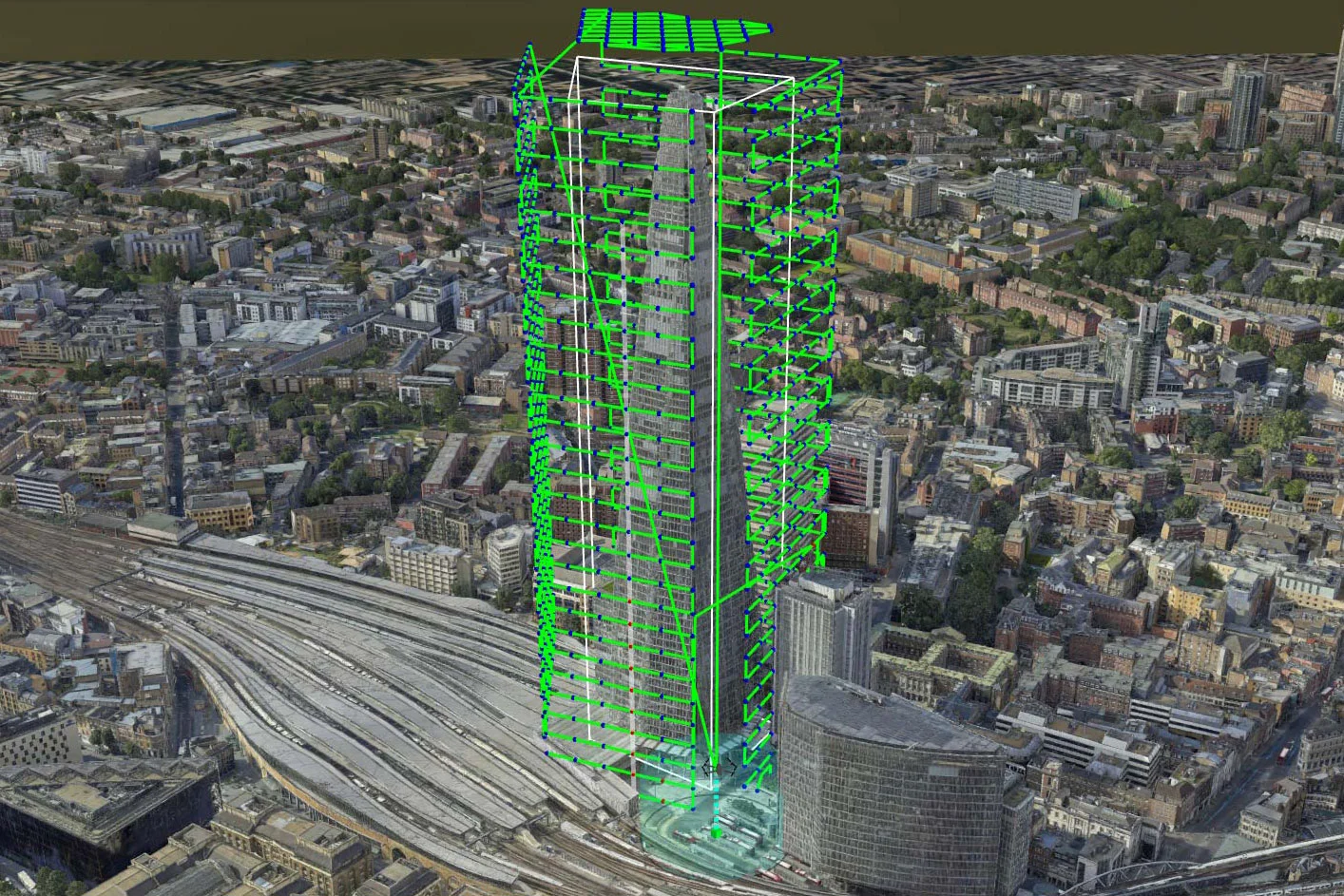
Optimized routes generated in real-time based and deconflicted towards terrain, buildings, airspace, static and dynamic hazards and other routes.
Gain crucial advantages for UAV Ground Control Stations and other systems that manage tactical video intelligence with real-time georeferenced video overlays.
Analysis of dynamic sensor data enables fast rerouting onboard uncrewed platforms. Carmenta technology supports multiple platforms, including Linux and Android.
Carmenta’s real-time geospatial analysis and routing capabilities help cope with dynamic challenges and support both human and autonomous decision-making.
Whether the mission is in reconnaissance, target tracking, intelligence gathering, perimeter surveillance, transportation, or resupply – for military or high-end civil use – Carmenta’s technologies for uncrewed systems improves the predictability and reliability of missions.






As part of Project Demo UCAV, Carmenta is proud to have participated in a drone exercise during Aurora 26, where its technology was used for UAS routing and mission planning.
Read more
At the International Drone Show, Carmenta and Airolit demonstrated how easily Carmenta UAS Mission Kit integrates into existing UAV ecosystems.
Read moreDENMARK: Explore how Carmenta's geospatial software can be used to support defense organisations with fast, reliable and high‑precision situational awareness.
Read moreExplore Carmenta’s offering for Unmanned Systems – From Mobile Devices to Cloud.
Are you ready to see how our products can transform your work? Request a free trial today and explore the full potential of our geospatial technology.
Please specify which product/products you are interested in.
This form can be used to request a trial for: