Tactical Drone Routing

Carmenta UAS Mission Kit offers a set of proven and reliable tools, training, and support – specifically designed for the development of UAS applications. It makes it possible to leverage Carmenta’s powerful geospatial technology to accelerate development time and reduce time-to-market.
Accelerate your development with Carmenta technology and training purpose-built for UAS applications. Save hundreds – or even thousands – of development hours.
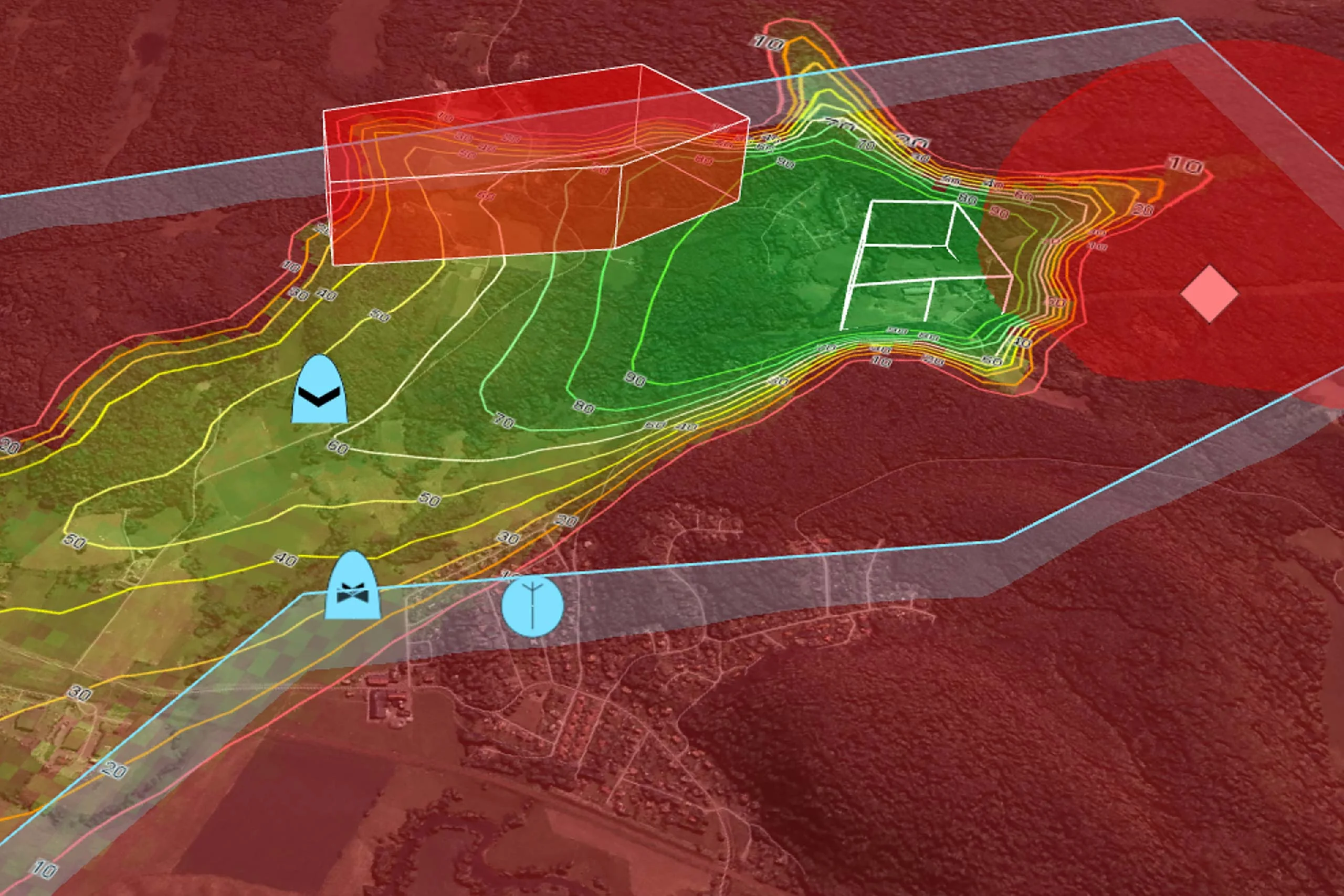
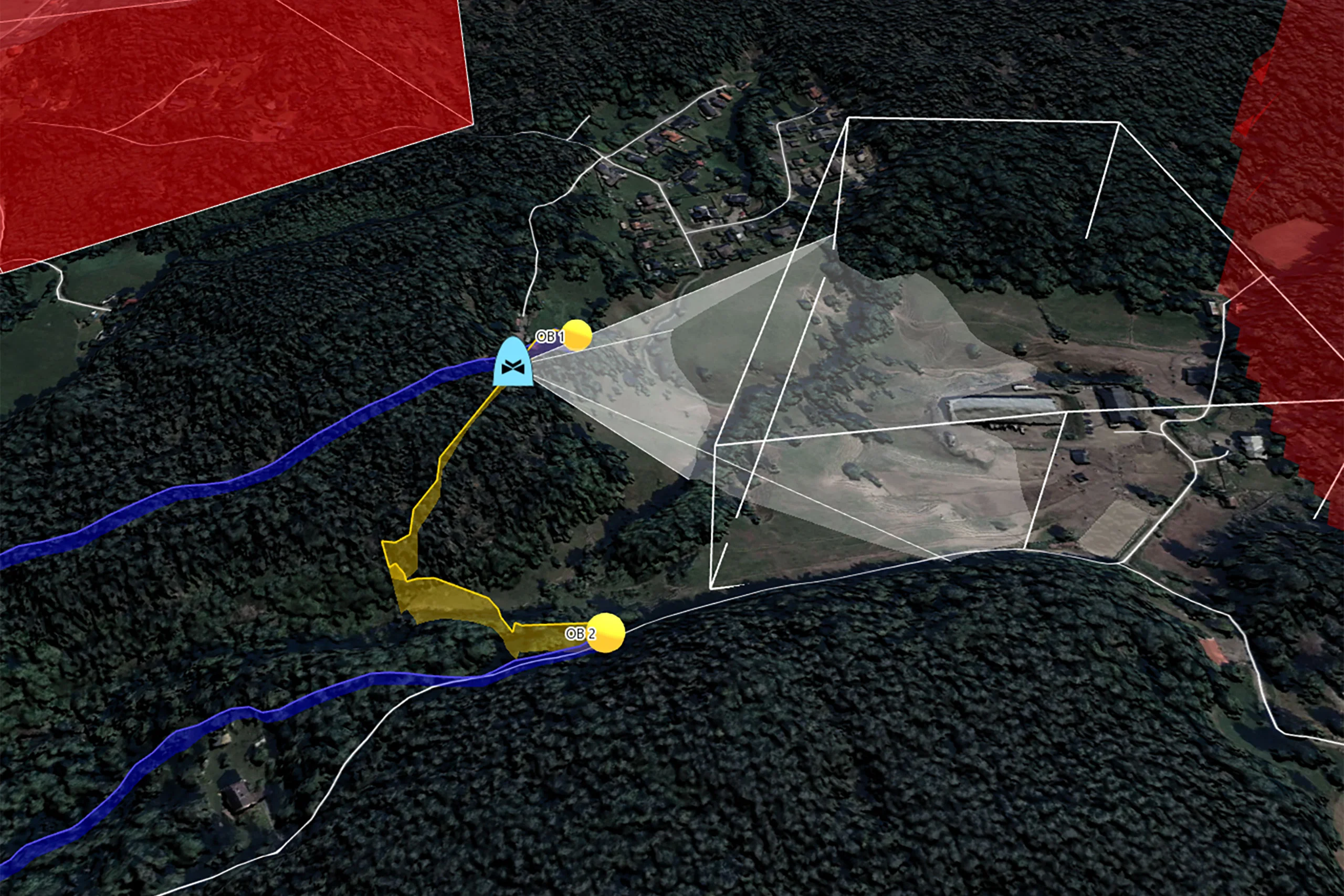
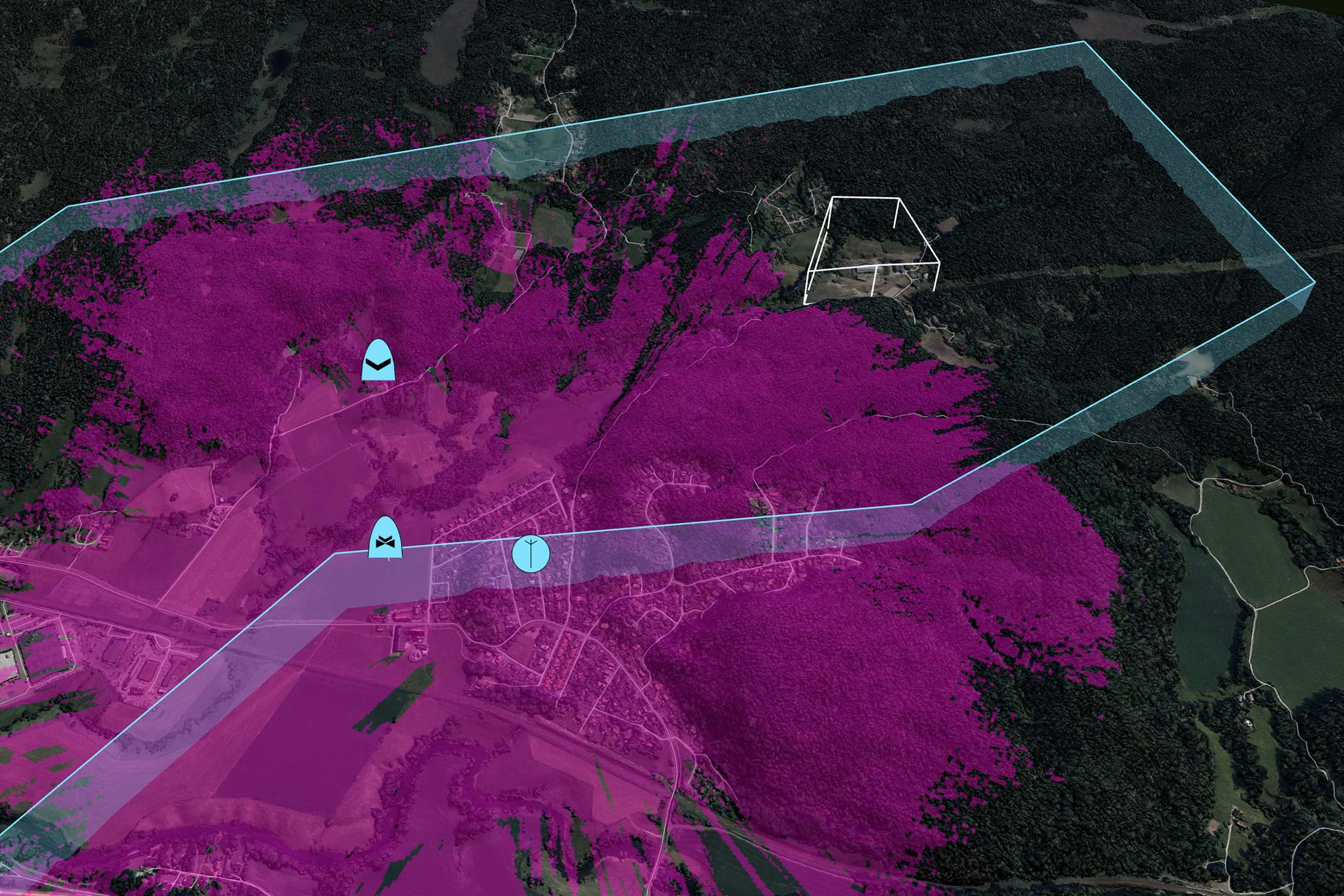
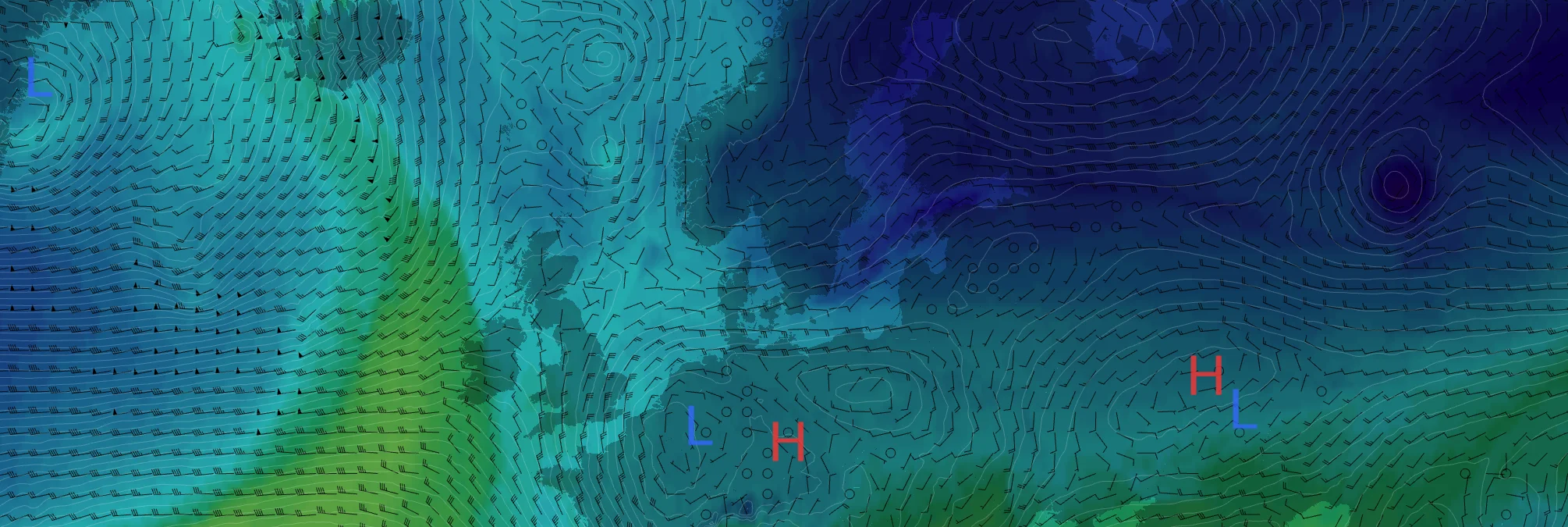
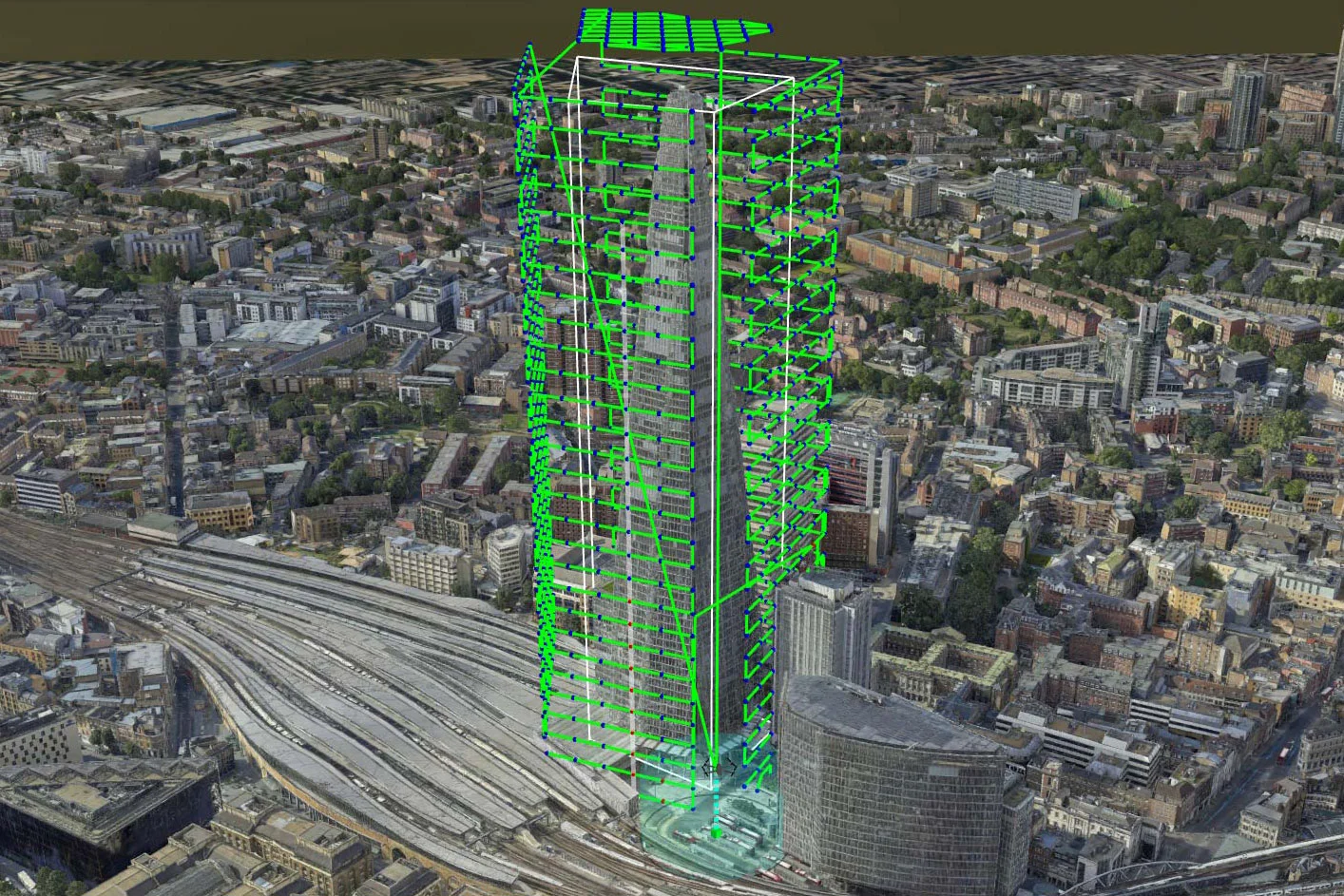
Comprehensive geospatial features for drones, from planning tactical stealth UAS routes to overlaying live georeferenced video.
Ready-to-use sample code and base architecture built on Carmenta’s proven technology and experience of developing capabilities for UAS applications.
Carmenta technology is field-tested, flexible and performant. With decades of experience, Carmenta is a trusted partner.
With increasing demands for advanced reconnaissance, target tracking, and resupply missions, organisations are under pressure to quickly deploy functional and adaptable technology for drones.
Carmenta UAS Mission Kit enables risk-mitigated and efficient development of custom high-complexity UAS mission applications for defense or high-end civil use.
Carmenta UAS Mission Kit is built on Carmenta’s proven technology and years of experience of developing capabilities for UAS applications.



The sample application and base architecture in Carmenta UAS Mission Kit provides a set of functionalities for UAS applications. These include:
Geospatial technology that empowers you to see more, know more, and make better decisions – in real time.




Simply fill out the form, and we’ll be in touch shortly.
Our experts will guide you through the full kit of features purpose-built for UAS operations and show how it can be tailored to fit your specific requirements.
Were you looking to request a trial of our products?
Request a Trial of Carmenta Engine och Carmenta Server.