
UAS mission planning and deconfliction in BVLOS drone operations
Operating drones in highly congested urban environments is a challenge. To do it beyond visual line of sight (BVLOS) and autonomously, within approved rules but without direct human intervention, is an even greater challenge.
This is what Carmenta technology has been developed to address in the HADO Project. The project’s objective has been to demonstrate that multiple drones can be safely and autonomously operated BVLOS in an high intensity environment.
Read more about the HADO Project
Generating an optimal route
Carmenta technology has played a key role in the project, handling geospatial functionality and advanced route planning for operating one or multiple drones autonomously and simultaneously BVLOS. Utilizing a high-resolution 3D model, Carmenta technology generates an optimal route, considering mission parameters; restriction areas, and other factors in real-time operations. The mission planning, or tactical planning, also integrates with UTM (Unmanned Aircraft System Traffic Management) and ATM (Air Traffic Management) systems, as well as other surrounding systems.
Use cases include perimeter surveillance, infrastructure inspection, incident inspection, or package delivery. Mission parameters and input factors encompass safe flight zones, restricted airspace, meteorological conditions, sensor coverage, and deconfliction of overlapping UAS flight corridors.
Series of Videos: Mission Planning to Managing Dynamic Hazards
In a series of videos, we here showcase various capabilities developed and used in the HADO project, ranging from mission planning (tactical planning) to placing a camera path with area restrictions, conducting building inspection, and managing dynamic hazards.
The 3D maps used in these examples are provided by Get Mapping Inc and offer high-resolution models of both Heathrow Airport and central London.
Mission Planning
This short introduction video provides a quick overview of drone mission planning powered by Carmenta technology, starting from a drone-in-a-box. It includes the following steps:
- Placing the drone-in-a-box at an appropriate spot.
- Placing waypoints, or observation points, at all locations where you want do or observe something.
- Route generation: The application suggests the best available route, considering obstacles and parameters such as buildings, restriction areas, overlapping UAS flight corridors, and sensor coverage.
- If waypoints/observations points are changed in any way, moved, or removed, or if restriction areas are changed, the route is automatically updated in real-time.
- Finally, route simulation with a viewshed enables vizualisation and line-of-sight analysis. Note that the window in the bottom right-hand corner shows a simulation of what the drone will actually see during its mission.
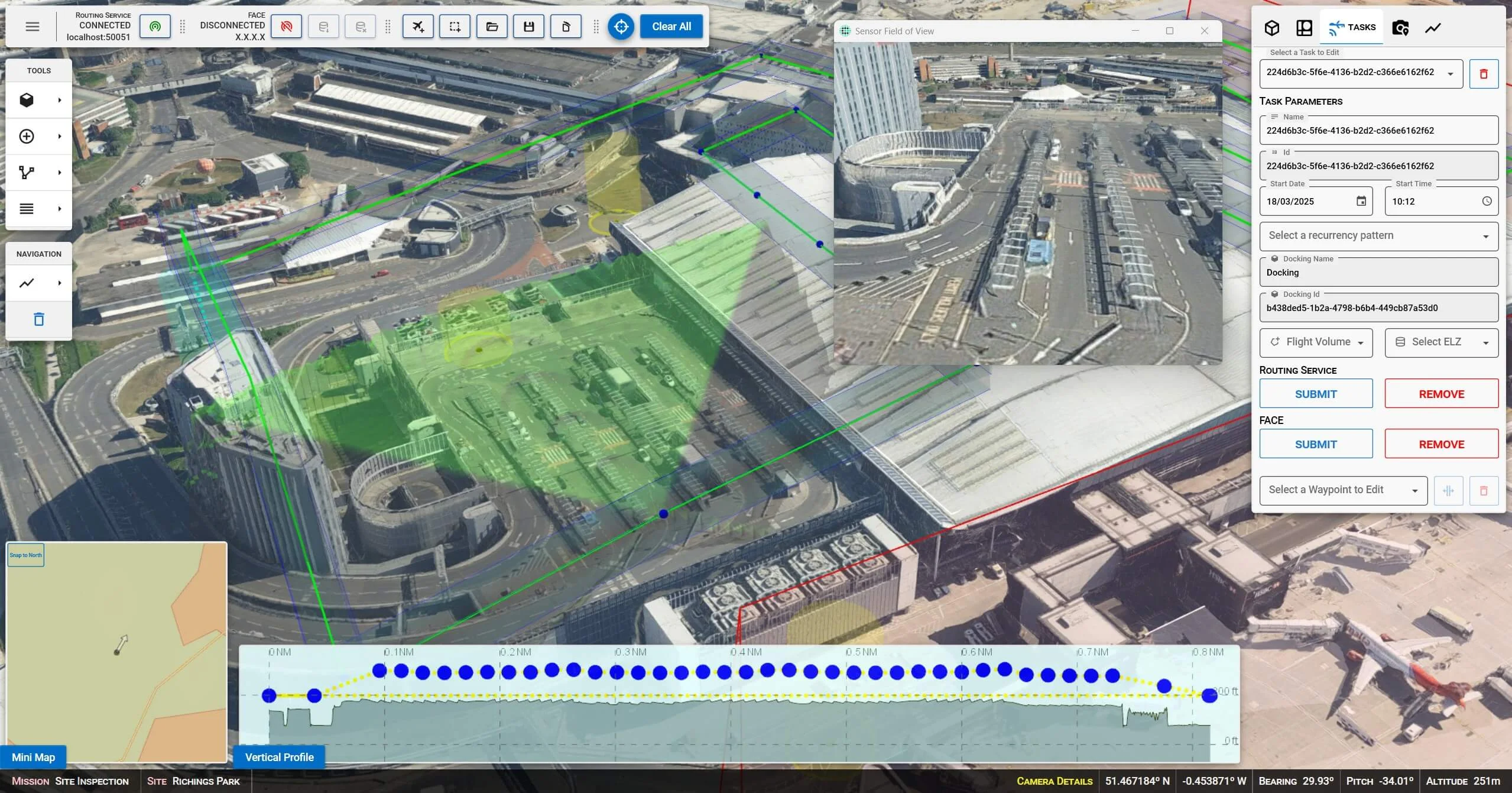
Fence Inspection
This video shows a fence inspection mission utilizing autonomous drones, in this example at London Heathrow Airport. As with the introduction above it starts with a drone-in-a-box. It includes the following steps:
- A predefined site is loaded into the application. This site includes a docking station and a flight volume geocage (the green polygon box).
- The Fence Inspection Tool is selected.
- Inspection waypoints are generated based on the marked route (the white line) and camera specifications.
- A deconflicted route is generated within the defined flight volume. The application generates a route that is deconflicted from objects within the flight volume geocage, in this case trees and bushes.
- Route simulation: The application simulates the movement of the drone through the planned route. The volumetric field of view is updated along the route.
Rooftop Inspection
This video shows a camera path calculation for inspection of a rooftop, utilizing autonomous drones. As in the example above, the location used is at London Heathrow Airport. It starts with a drone-in-a-box and includes the following steps:
- A predefined site is loaded into the application. This site includes a docking station and a flight volume geocage (the green polygon box).
- The Parallel Pattern Inspection Tool is selected.
- Inspection waypoints are generated, based on the marked route (the white line) and camera specifications to allow for full coverage inspection of the roof.
- A deconflicted route is generated within the defined flight volume. The application generates a route that is deconflicted from objects within the flight volume geocage.
- To show and verify the camera coverage, a volumetric field of view is activated, which projects a green volume from the point of view of the waypoints.
- Route simulation: The application simulates the movement of the drone through the planned route. The volumetric field of view is updated along the route.
Simulated Camera View and Analysis
This video shows how to use both line-of-sight analysis and a simulated camera view for dynamic and flexible mission planning. The camera parameters can be fine-tuned in the 3D environment, with instant feedback, to ensure that the captured result will be exactly as expected.
This approach takes UAS mission planning beyond traditional route planning. It shifts the traditional focus on flight paths to focus on the actual objectives of the mission and what the UAV can see.
- The drone starts from a “drone-in-a-box”.
- Waypoints, or observation points (blue dots), are placed at all locations where you want the camera to observe something.
- A route is generated (yellow dotted line).
- A viewshed enables vizualisation and line-of-sight analysis. The Field of View Sensor (the window in the bottom right hand corner) shows what the camera will capture.
Volume Routing using Box Inspection Pattern
Autonomous drones can be used to quickly and efficiently inspect hard-to-reach areas, such as the surface of a building. This video from the HADO Project shows the generation of a UAS route using a box volume pattern, or camera box path calculation for such an inspection, with an example from the One Blackfriars building in London.
- The drone starts from a docking station; a “drone-in-a-box”.
- Waypoints, or observation points (blue dots), are placed to mark the first section of the flight route.
- The Box Inspection Pattern is selected and a (white) polygon is marked around the building being inspected.
- The application detects the highest peak (in this case the top of the building) within the white polygon and generates a pattern of waypoints that navigate around the building and rooftop.
- The Box Inspection Pattern calculates both waypoints and route to make sure it covers the whole surface of the building. It uses the camera specifications to determine the distance to each side of the polygon, and to set the camera in the correct direction to capture images. Post processing of these images will generate a full 3D image of the object being inspected.
- Route simulation: The application simulates the movement of the drone through the planned route. The volumetric field of view is updated along the route.
Routing Parameters
A variety of parameters need to be considered in mission planning and autonomous routing of Unmanned Aerial Systems (UAS). This video, using the Tower of London as an example location, show examples of some routing parameters that effect the planning of a drone mission.
- It starts with the placement of the docking station (small green box).
- An emergency landing site is defined (yellow space).
- Restricted volumes (the red boxes) indicate airspace where the drone is not allowed to fly.
- The site airspace volume (green space) defines the safe flight zone; the airspace within which the drone has to stay.
- The yellow dotted line shows the planned route. However, note that it passes through one of the restricted airspaces.
- The green line represents the deconflicted route, ensuring that the drone avoids flying through restricted airspace.
- The blue space surrounding the flight route visualizes the route or flight corridor.
Deconfliction of Routes
When planning for several drones to fly within the same space at the same time, it is crucial that the UAV paths do not cross. This video, using the area around Tower Bridge in London as an example location, shows how two routes are planned simultaneously, and how paths are calculated to ensure that they do not cross. If the paths are changed, the routes are automatically deconflicted.
- Two UAV missions are planned in the same area.
- Deconflicted routes are calculated.
- Route corridors around the route ensure that the routes are not conflicting.
- When one mission waypoint is moved, the routes are automatically recalculated.
- Corridors are deconflicted where overlapping.
- Route curtains help visualize the route altitude.
- Simulation of route shows the planned camera view and viewshed.
Managing Dynamic Hazards
The demo video presents various situations in which a dynamic hazard obstructs the predetermined path of an uncrewed aircraft, demonstrating the process of real-time route recalculation. It highlights the advanced technology that allows for immediate adjustments to ensure the aircraft’s safe navigation and mission success. This capability is crucial, particularly in environments where conditions can change unpredictably, necessitating swift and autonomous rerouting.
- When a Dynamic Hazard is moving towards the path, the route is recalculated to avoid the dynamic hazard.
- Approaching Hazard – When a Dynamic Hazard is obstructing the next waypoint, the route is then cut short so the drone can hover and wait the hazard to clear.
- Escaping a Hazard – When a Dynamic Hazard is obstructing the uncrewed aircraft, the route will attempt to find the shortest path out of the hazard.
- Route simulation of the deconflicted path.
Please note: the aircrafts in the 3D model are only there for illustrative purposes and are not taken into consideration in the calculations.
Carmenta Concludes Innovative Project on Autonomous Drone Flights in Heathrow Airport’s Flight Restriction Zone (FRZ)
Carmenta is proud to announce the conclusion of the HADO project, paving the way for safe and autonomous drone flights in urban environments and high-intensity airspace.
Technology to Empower Uncrewed Systems
Explore Carmenta’s offering for Unmanned Systems – From Mobile Devices to Cloud.
Try for free – no commitment
Are you ready to see how our products can transform your work? Request a free trial today and explore the full potential of our geospatial technology.
Our free product evaluation includes:
- 30 days unlimited access to our SDK.
- Full access to our e-mail support during the evaluation period.
- Full access to our online self-study course during the evaluation period.
Please specify which product/products you are interested in.
This form can be used to request a trial for:
- Carmenta Engine
- Carmenta Server
- Carmenta Map Builder