Terrain Vehicle Mobility
As advancements continue, the future of UGVs is set to be fully autonomous. The first autonomous platforms delivering supplies (such as medical supplies, ammunition, or fuel) to frontline troops are already in use or about to be deployed.
However, achieving operational efficiency in both semi- and fully autonomous UGV routing and mission execution is challenging. Key aspects such as route optimization, dynamic mission planning, and real-time environmental awareness underscore the need for robust geospatial technologies and well-integrated autonomy stacks.

Successfully deploying UGVs in dynamic environments requires addressing multiple challenges that demand sophisticated geospatial solutions, including:
UGVs often operate in highly dynamic environments, both urban areas and rugged terrains. Navigating these spaces not only requires precise geospatial data, but also the use of advanced geospatial analysis to understand and adapt to these environments, and identify safe pathways.
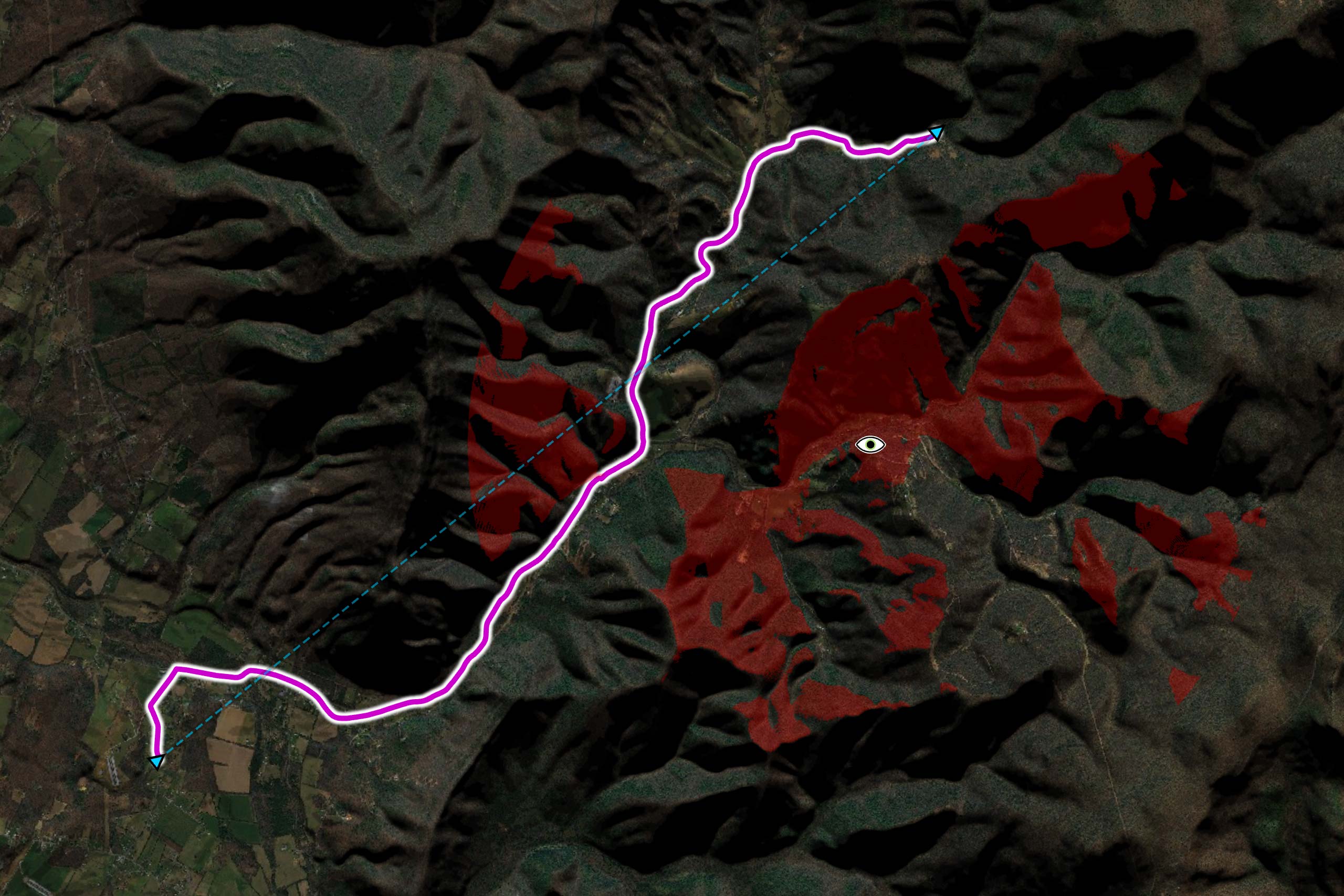
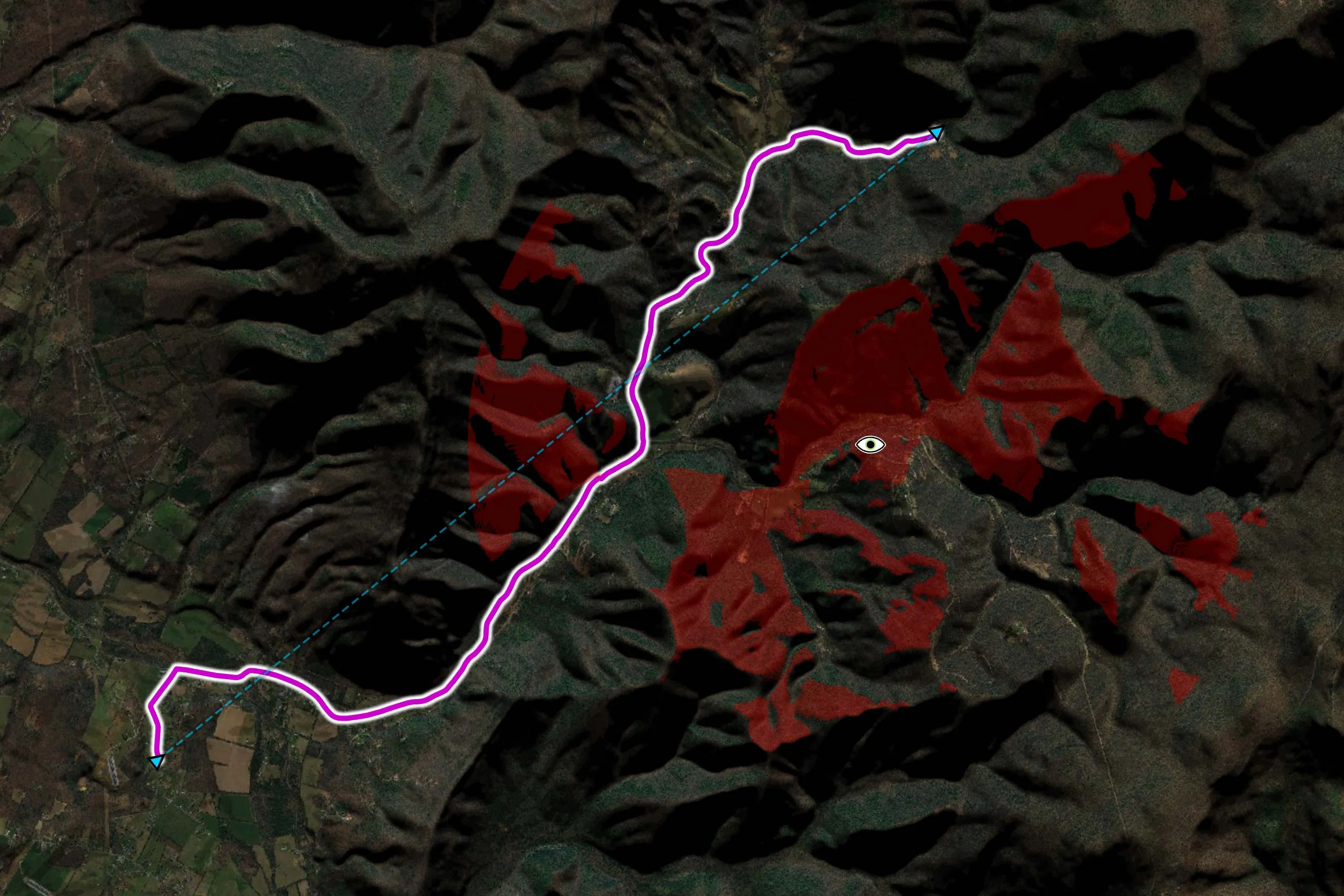
Example of a UGV route generated using Carmenta’s technology, taking the terrain characteristics into account while staying out of sight of an enemy observer.
Missions often involve evolving objectives, such as searching for a target, delivering supplies, or conducting reconnaissance. A static plan is insufficient—UGVs need the capability to re-plan and adjust routes dynamically. Geospatial data analysis and visualization – such as terrain elevation models and real-time analysis of the environment – help UGVs dynamically plan and adjust optimal routes based on mission objectives and environmental changes
Geospatial technology can enhance mission adaptability by providing real-time data on terrain, obstacles, and changing conditions, enabling UGVs to dynamically adjust routes based on mission-specific objectives and evolving constraints.
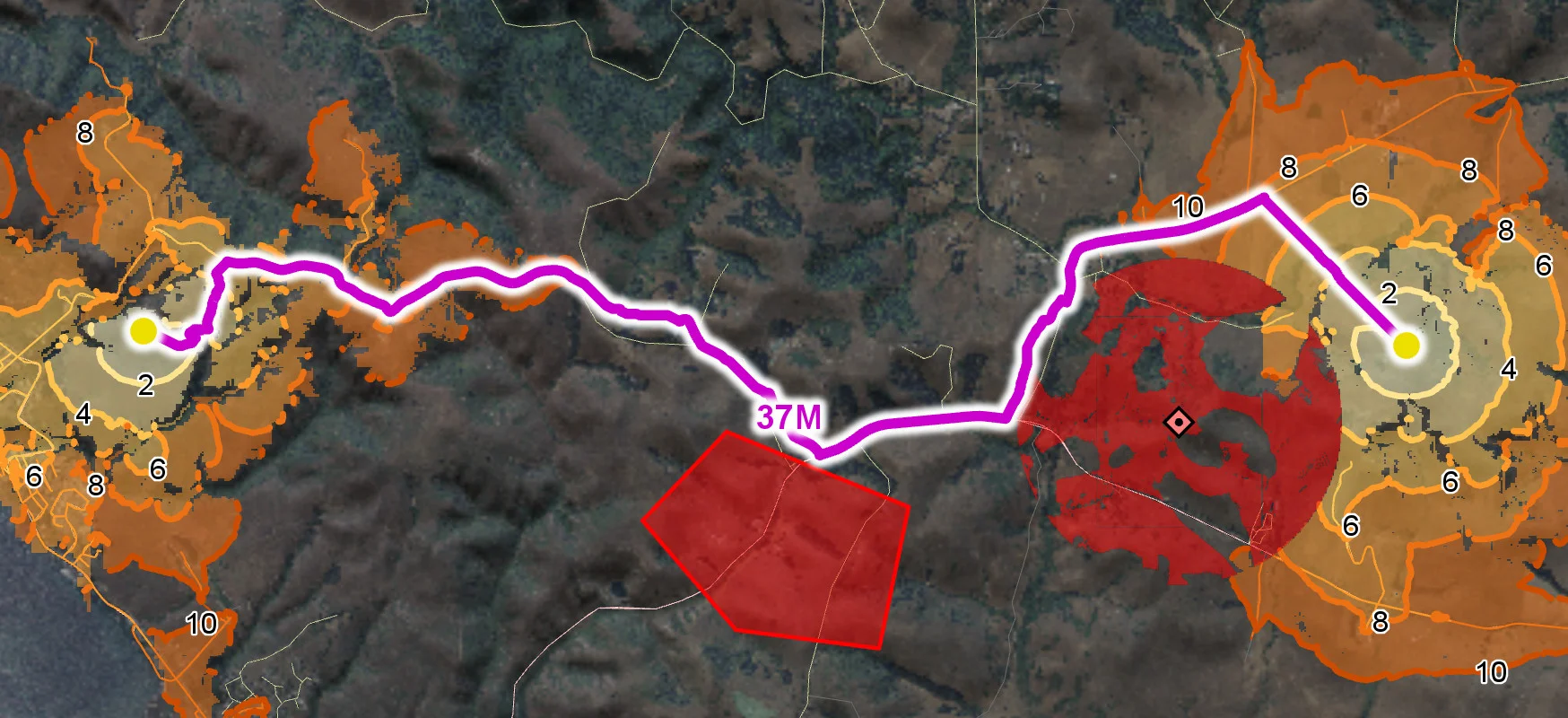
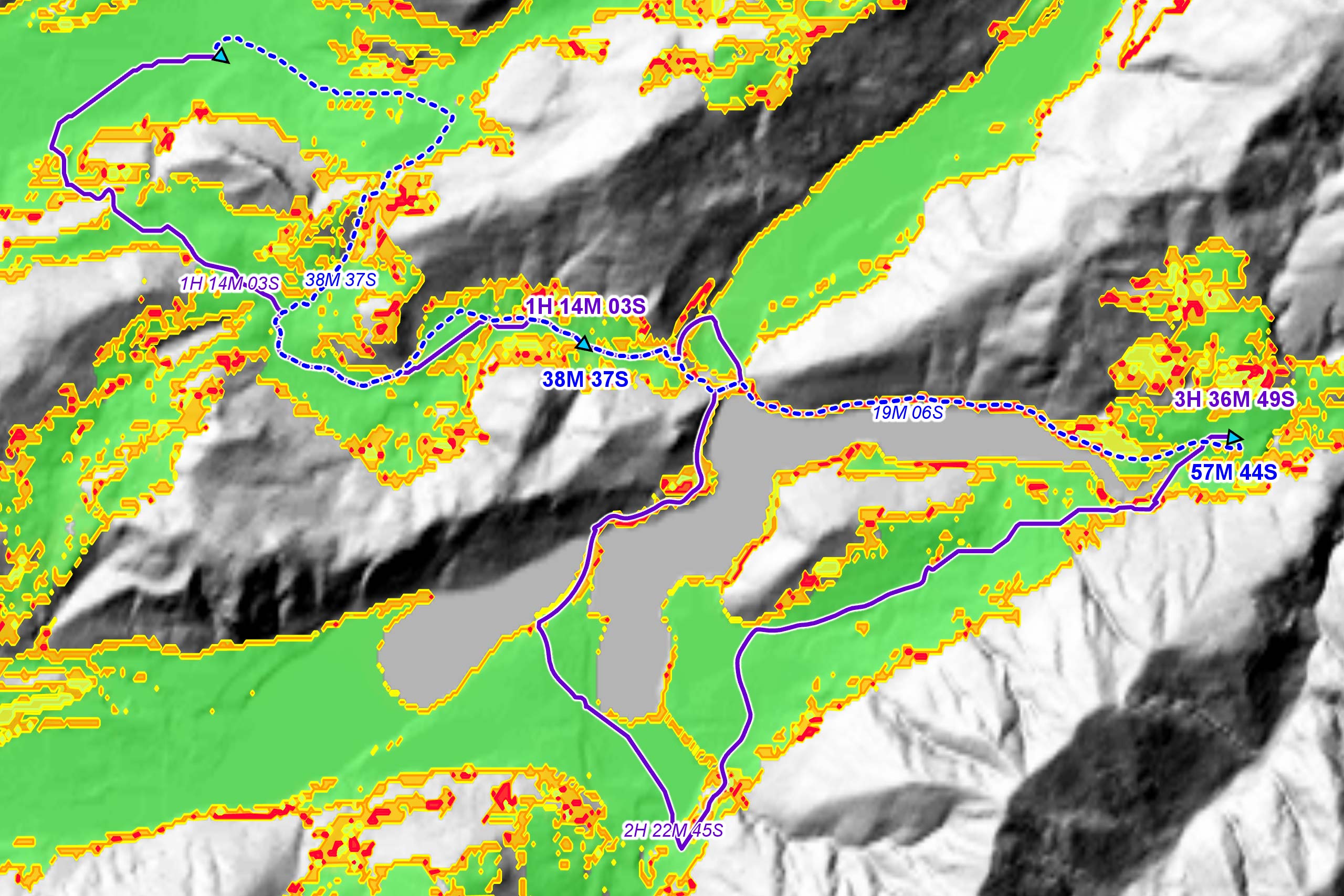
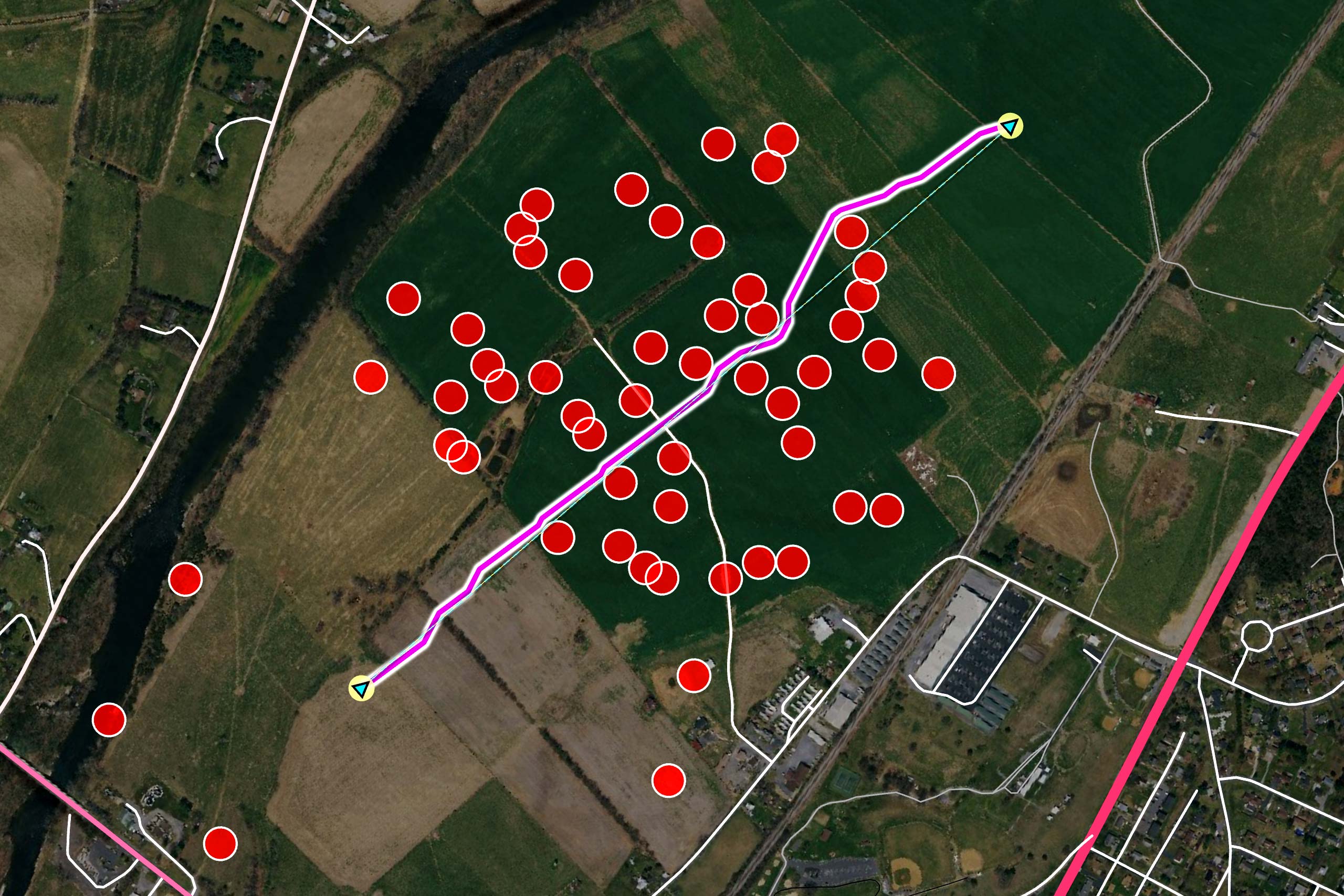
Determining the optimal route for a resupply UGV in order to reach one of several possible rendezvous points in a timely manner.
Risk-adaptive Rendezvous Planning for Resupply Missions in the Battlefield
Efficient routing involves calculating paths that minimize energy consumption, travel time, and/or risk exposure. Determining the “best” route is complex and highly dependent on the specific objectives and constraints of each mission. For example, a military operation might prioritize the most concealed route to avoid detection in a dynamically changing tactical environment, while a commercial delivery service might consider the fastest or most fuel-efficient route.
By recalculating and adjusting the route onboard and in real-time, the route can be further optimized.
Planning a robust off-road route with Carmenta’s technology. By analyzing the traversability of the surrounding terrain it is possible to generate routes that are as resilient as possible to sudden changes, such as roadblocks, along the way.
UGVs encounter unpredictable obstacles that may be impassable. Geospatial technology enables accurate mapping of these obstacles, allowing immediate route adjustments and allows the detected obstacles to immediately be taken into account in the route planning.
Geospatial technology can play a key role in the vehicle’s autonomy stack (also called Autonomy Kit or A-Kit), helping it respond in the best way possible to changes in the environment during the course of the mission, even when the connection to base has been lost.
Carmenta’s geospatial technology offers a comprehensive suite of capabilities for UGV routing, supporting both semi-autonomous vehicles and the autonomy stacks of fully autonomous platforms. Our embedded solutions provide detailed terrain analysis, dynamic routing, and real-time recalculations.
Route planning begins with understanding the terrain that the UGV must navigate. Carmenta’s geospatial capabilities enable autonomous platforms to assess and adapt to environmental conditions, ensuring safe and efficient navigation in complex terrains and off-road environments.
Using terrain analysis and elevation data, Carmenta terrain routing makes it possible to identify areas that are suitable for the UGV as well as areas that are impossible to reach with that particular vehicle. By combining this terrain information with our high-performance routing engine the traversability of the terrain can be displayed in real time for a moving vehicle.
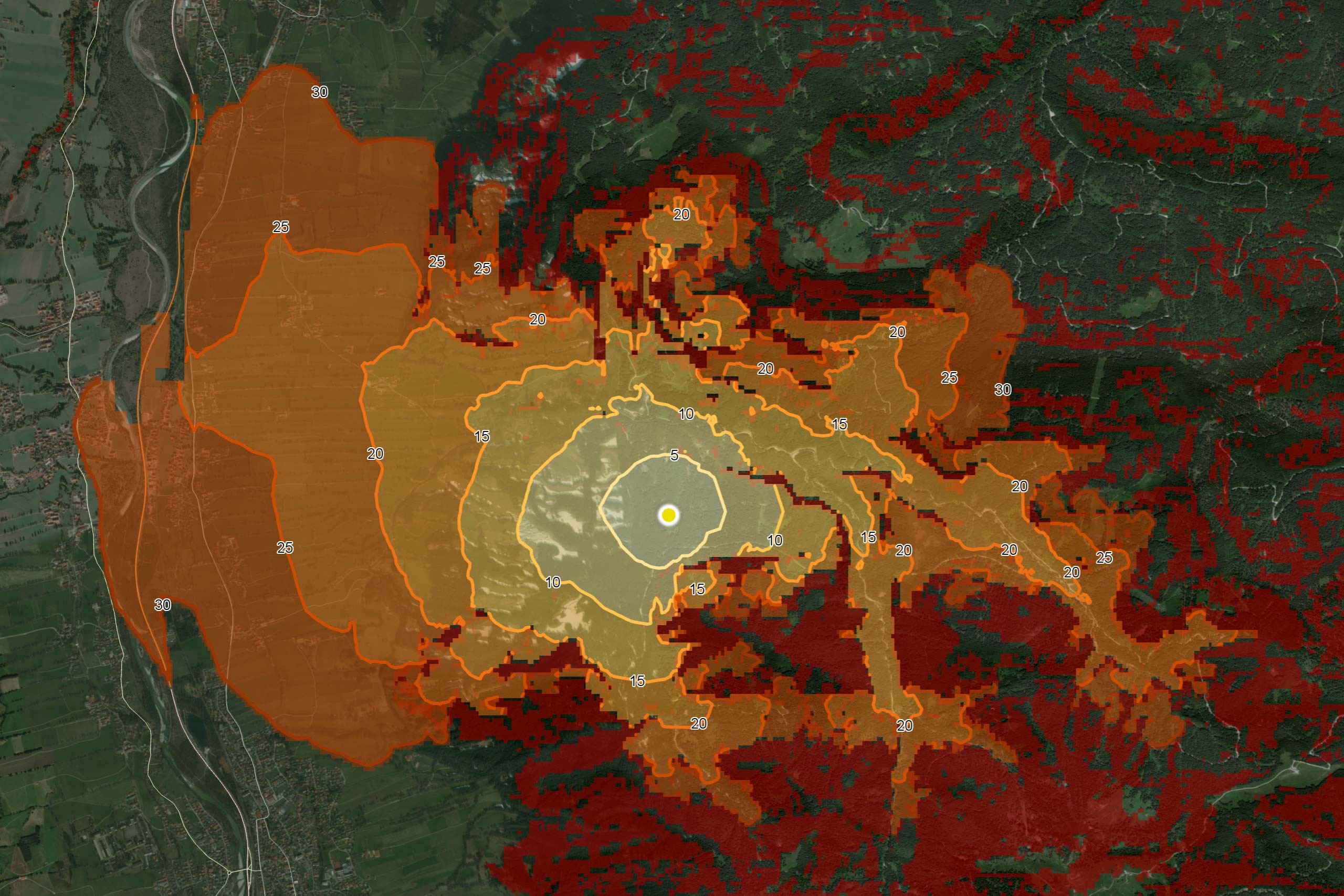
The yellow and orange areas are so-called isochrones, indicating how far the UGV can traverse in a certain amount of time from its current position. Isochrones give operators an immediate understanding of the accessibility of the terrain.
Key factors which impact navigability and energy efficiency include the slope and the type of terrain. Different types of terrain have different load bearing capacity. Surface structure, which describes how uneven the ground is, further influences mobility, particularly in rough environments.
The tactical situation also play into path optimization, such as shortest path, optimizing for fuel efficiency, safety, stealth, or mission priority. By using fast algorithms, it is possible to calculate the travel time to any point within a given area and determine which areas can be reached with the current vehicle and timeframe. Depending on the mission objectives, Carmenta’s terrain routing can also assign a corridor of movement to the UGV, within which the best route is to be calculated.
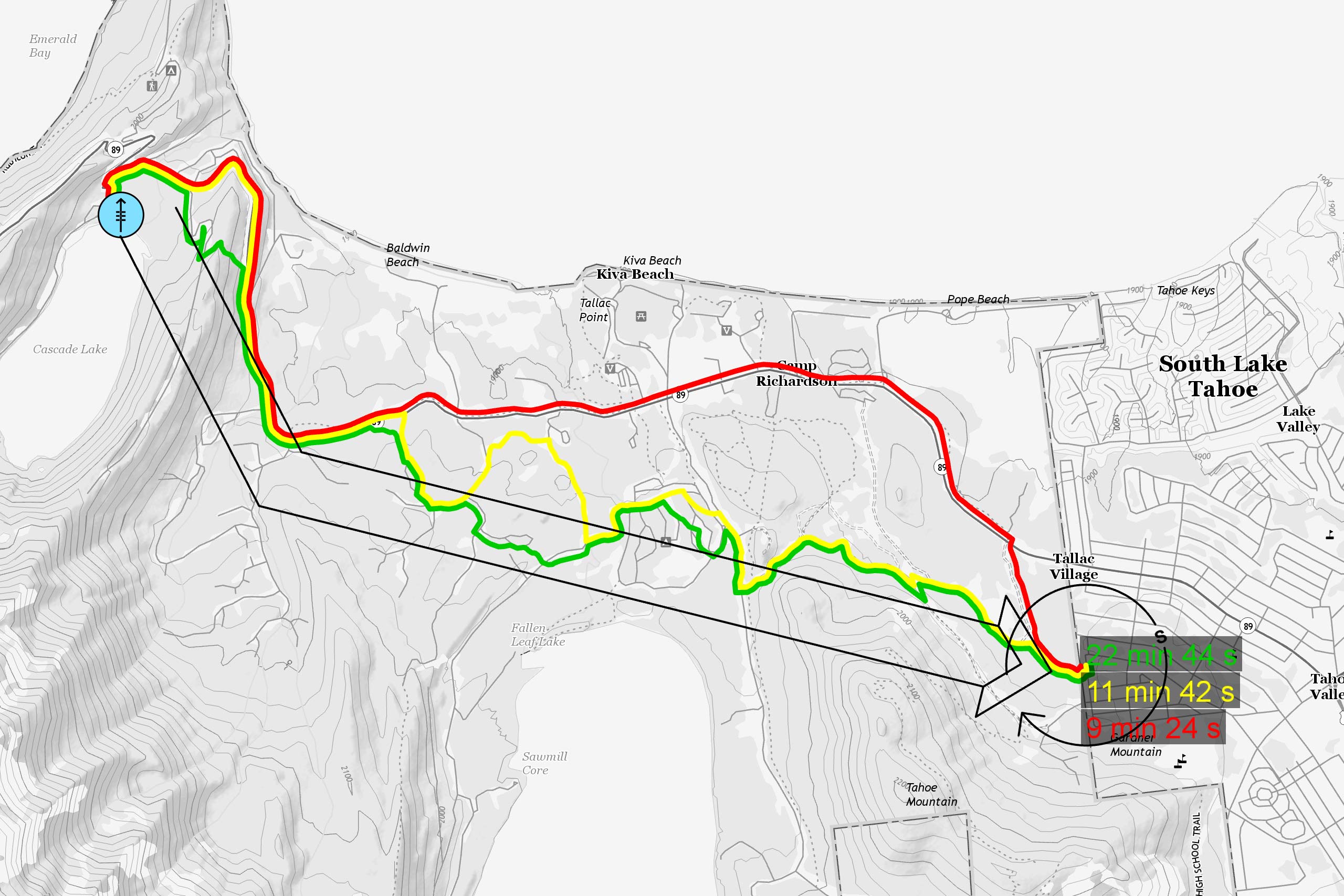
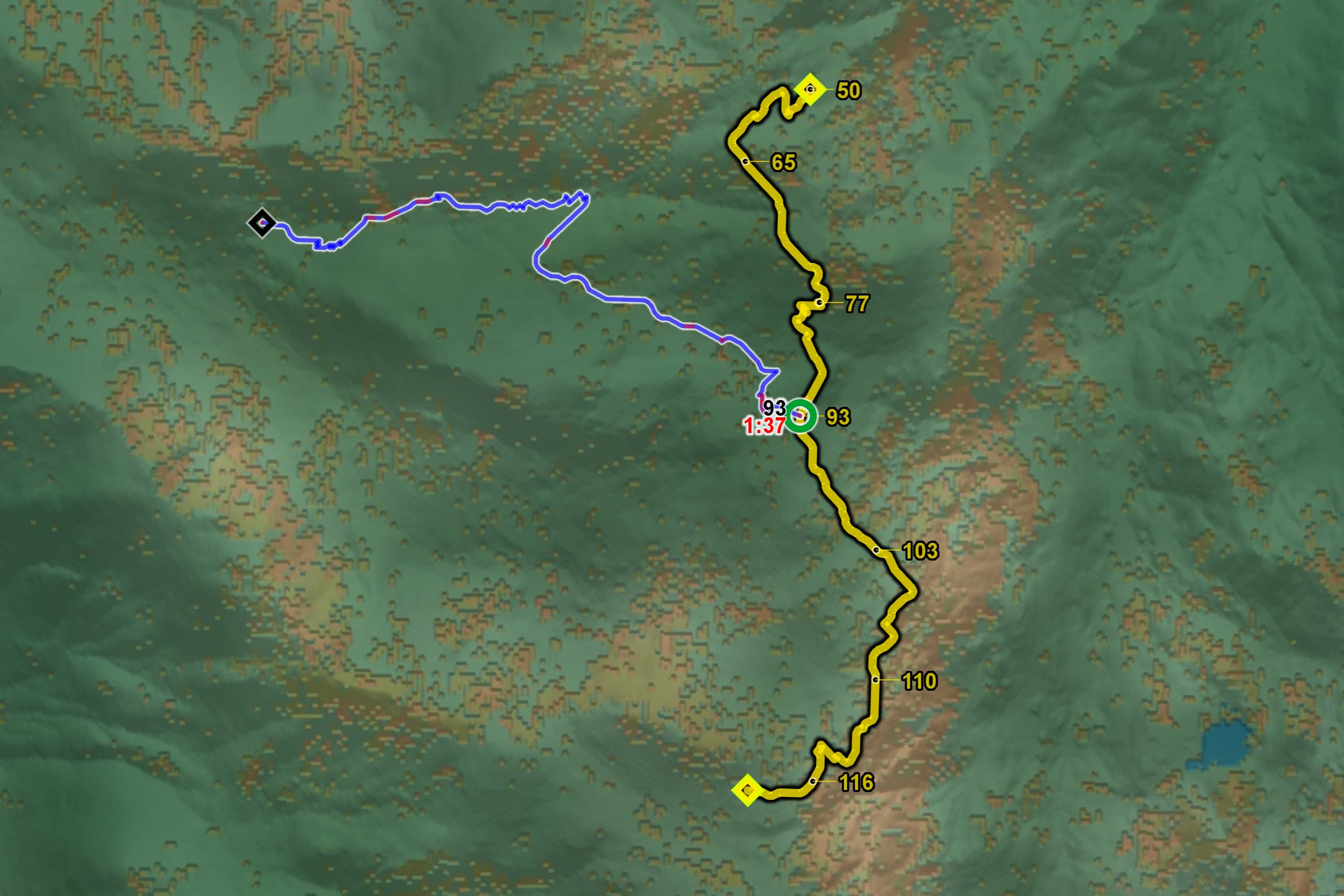
Route planning along a corridor using three different safety factors for the surrounding terrain. The green route deviates the least from the corridor but takes more than twice as long to reach the target position.
Vehicle characteristics are key in UGV route planning, as it impacts how the vehicle can handle its environment, such as different ground types and slopes, the speed at which it can travel and other advantages and limitations. Carmenta’s terrain routing is fully configurable to set vehicle characteristics.

Carmenta’s terrain routing can incorporate real-time tactical information, such as enemy positions, restricted areas, and sensor coverage, making it possible to react immediately to tactical changes and adjust the calculated route accordingly. This enables the UGV to avoid threats and maintain operational security.
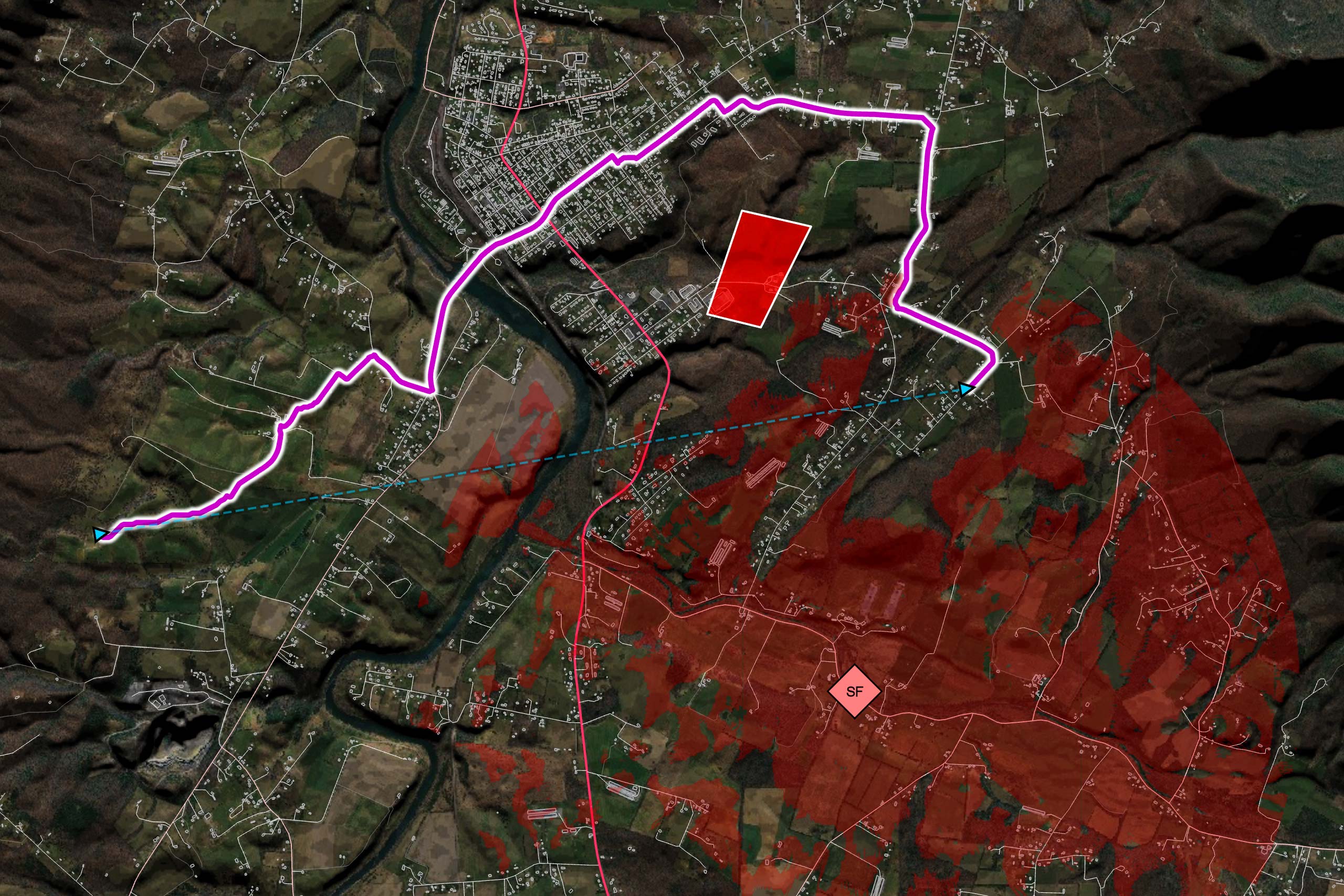
Planning a tactical route, on and off roads, in a city environment. The route avoids restricted areas and the viewshed of enemy observers.
When the UGV encounters a previously unknown, impassable obstacle, Carmenta technology can be used to recalculate the route, considering tactical instructions and minimizing exposure to risks. The information can also be reported back and over time an obstacle map is built that not only increases the efficiency of the UGV, but also significantly increases its usefulness in complex environments.
Screenshot from a Carmenta technical demonstrator that showcases the ability of the routing engine to immediately adapt to new obstacles as they are detected.
Carmenta’s SDK provides robust cross-platform capabilities, including comprehensive support for Embedded Linux and can be embedded in all types of uncrewed platforms, whether teleoperated, semi-autonomous or in autonomy stacks of fully autonomous platforms. Deployed in some of the most demanding environments across the world, Carmenta technology is flexible, reliable and designed for high performance.

Carmenta Engine for ARM Linux running on an embedded hardware platform.
By calculating the best route to a given target, the Carmenta terrain routing optimizes the UGV’s operational capabilities, ensuring timely and reliable task completion. It provides a robust solution that can adapt to the complex demands of real-world terrain navigation.
The real-time route analysis in the Carmenta Engine combines tactical information, vehicle characteristics and different types of terrain data at every step of the journey. Using existing waypoints or adding new ones results in instant recalculation of the optimal route.
Using AI-assisted computer vision, robust, near-live navigability maps and terrain analyses – continuously adapted to any detected changes – are created using 3D reconstruction, object recognition and scene-based analysis.



Geospatial technology that empowers you to see more, know more, and make better decisions – in real time.
Are you ready to see how our products can transform your work? Request a free trial today and explore the full potential of our geospatial technology.
Please specify which product/products you are interested in.
This form can be used to request a trial for: