Multi-Objective Optimization
Balancing robustness with travel time requires multi-objective optimization. Pareto-optimal paths represent solutions that maximize both speed and resilience, giving mission planners a set of viable alternatives.
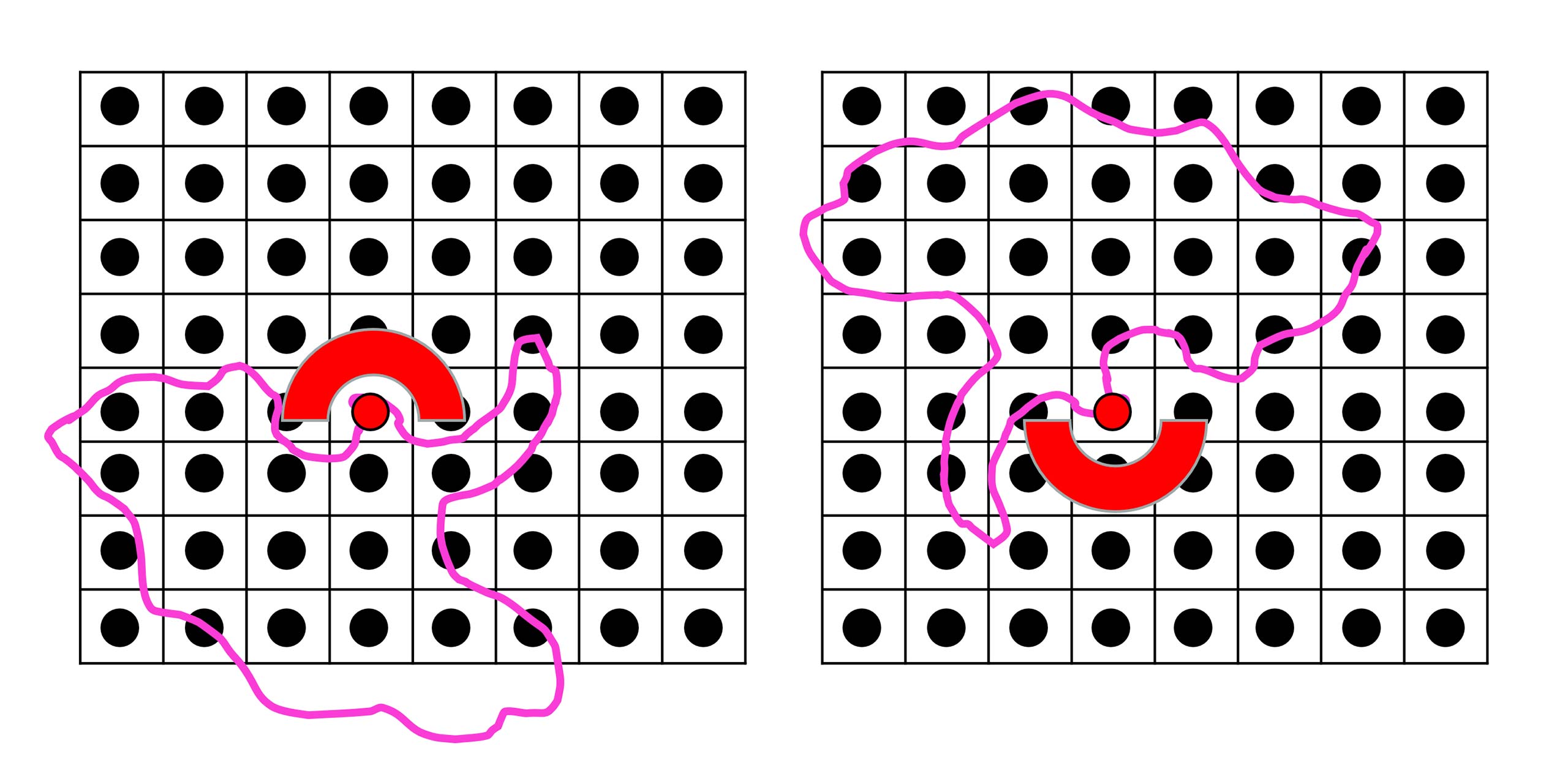
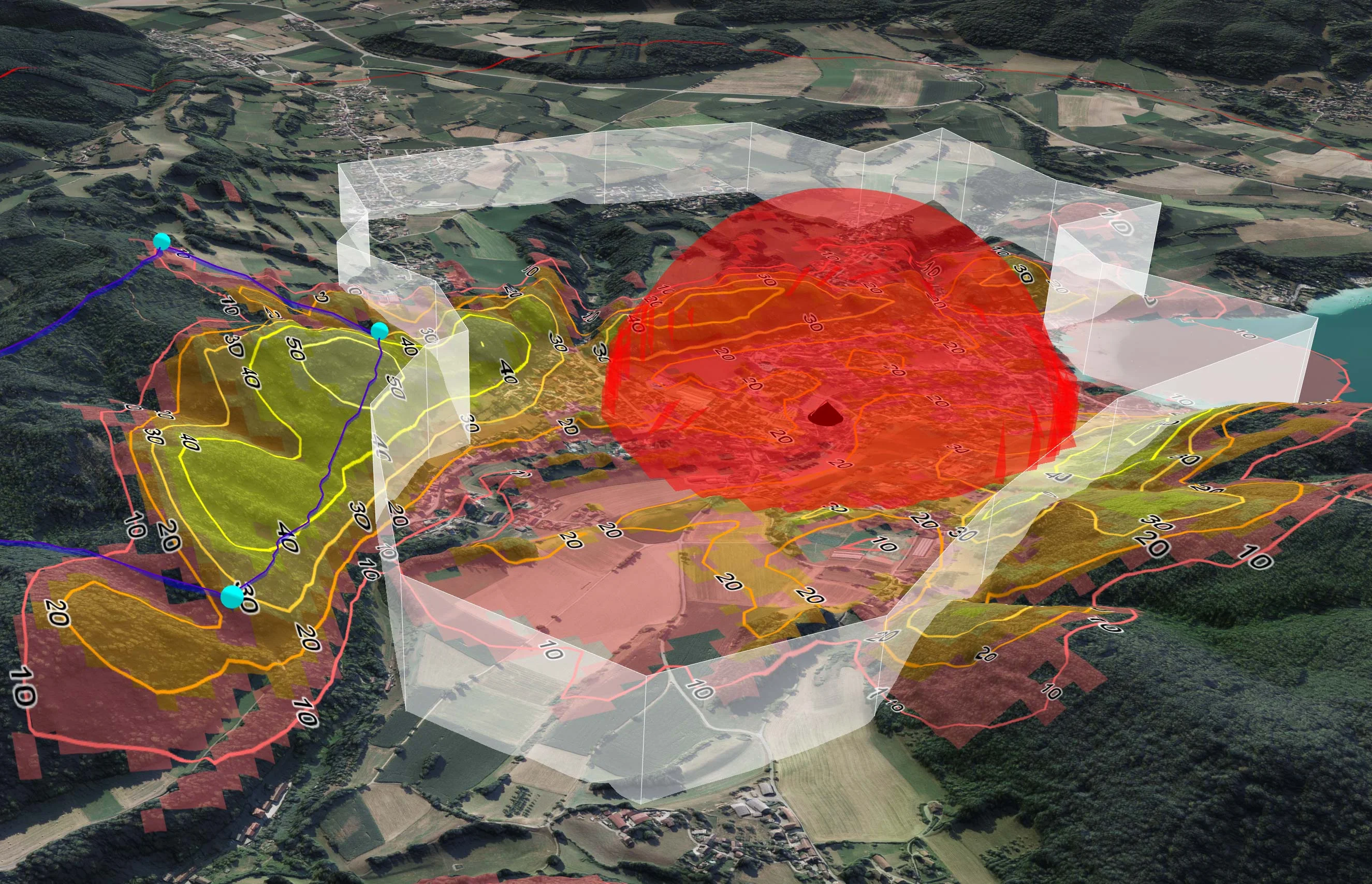
Heat maps visualize robustness across a region, highlighting areas where disruptions would significantly increase travel time. By comparing maps generated with different obstacle sizes, planners can adjust robustness parameters to suit mission needs.
Performance and Efficiency
Generating robustness maps requires significant processing time but is feasible for mission planning. Once generated, these maps can be reused for various path planning processes.
One challenge is that robust paths often divert toward open areas, potentially increasing exposure risk. To address this, we propose integrating exposure as a third objective in optimization, balancing resilience with stealth.
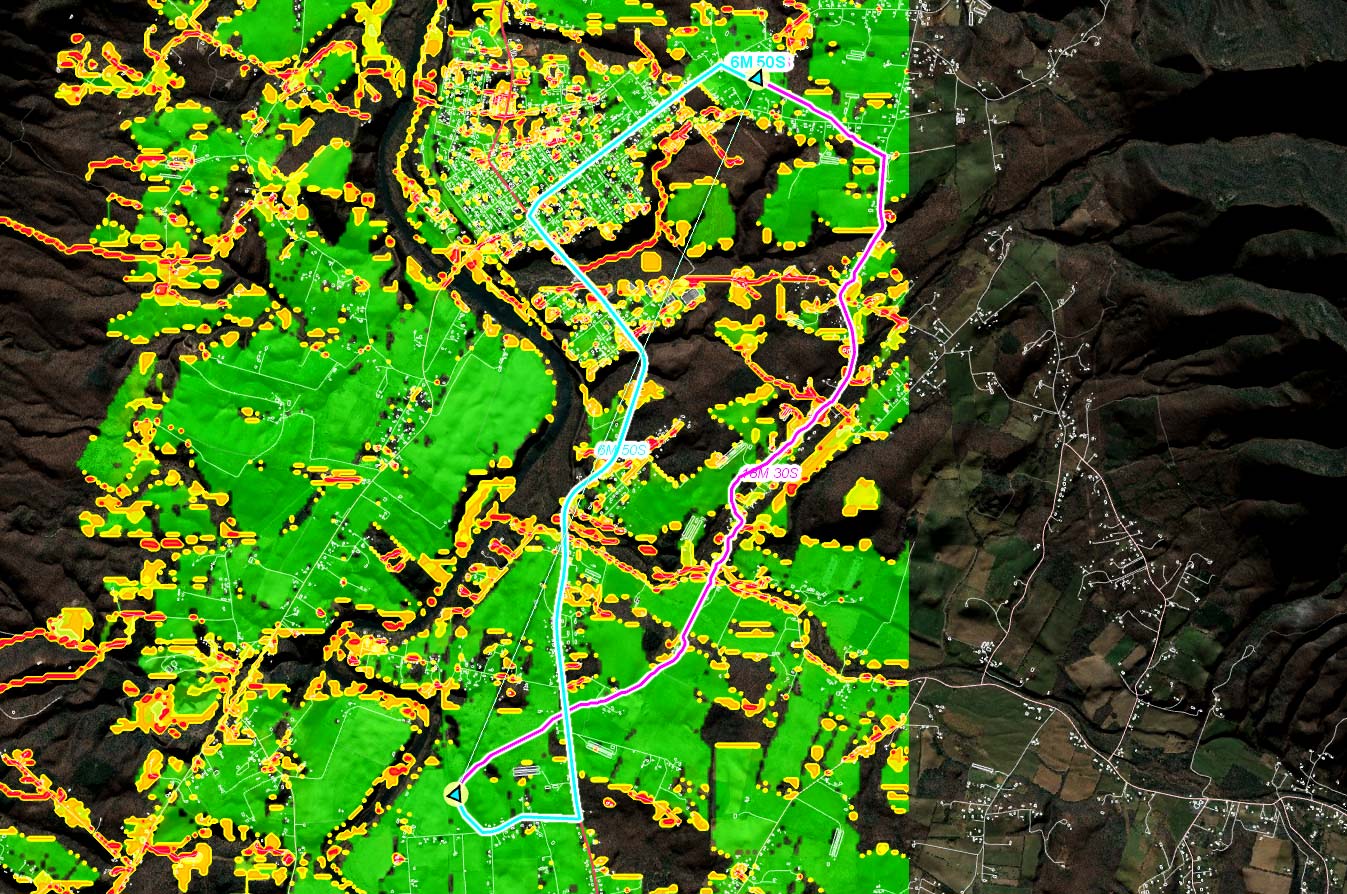
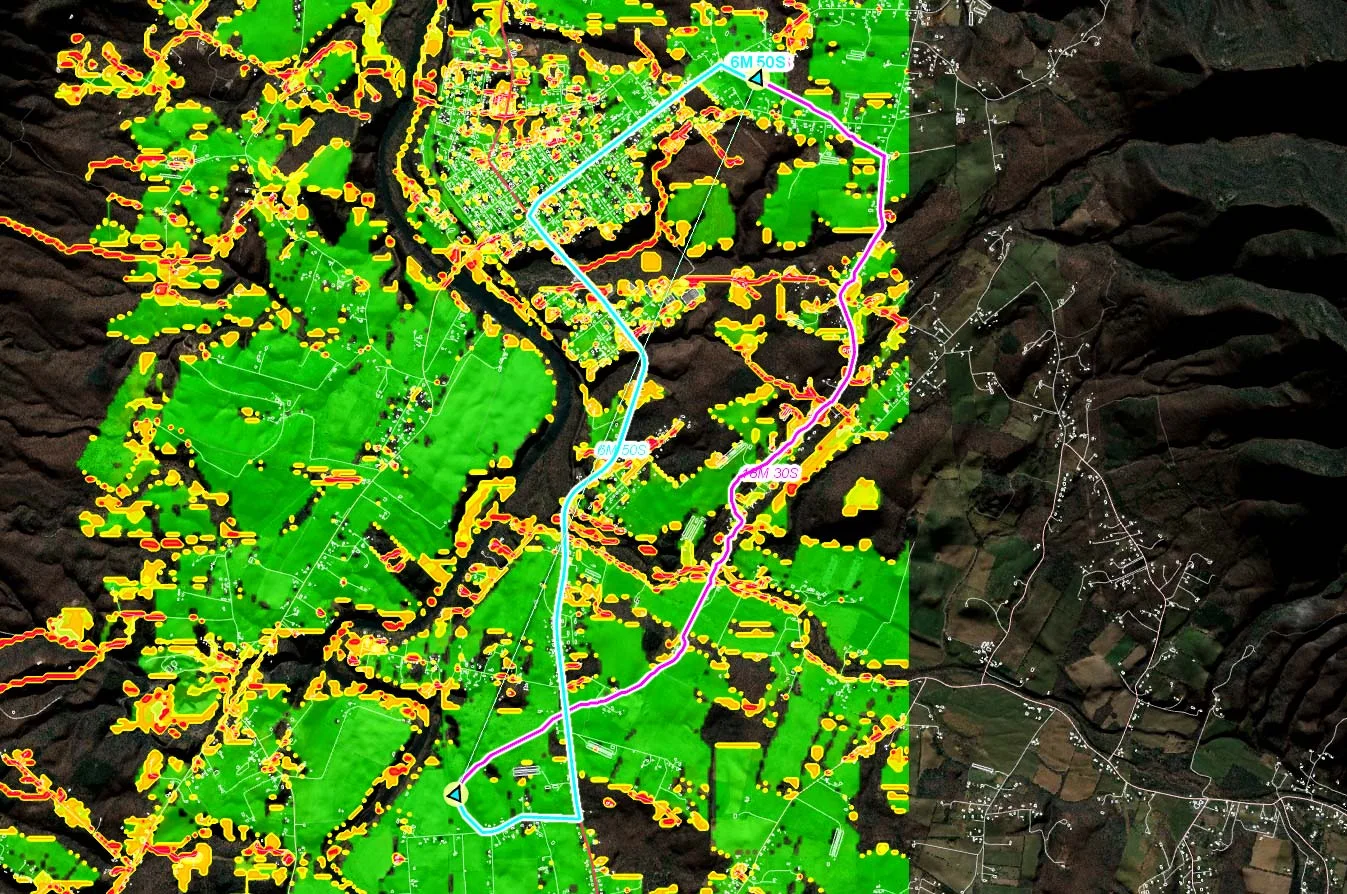
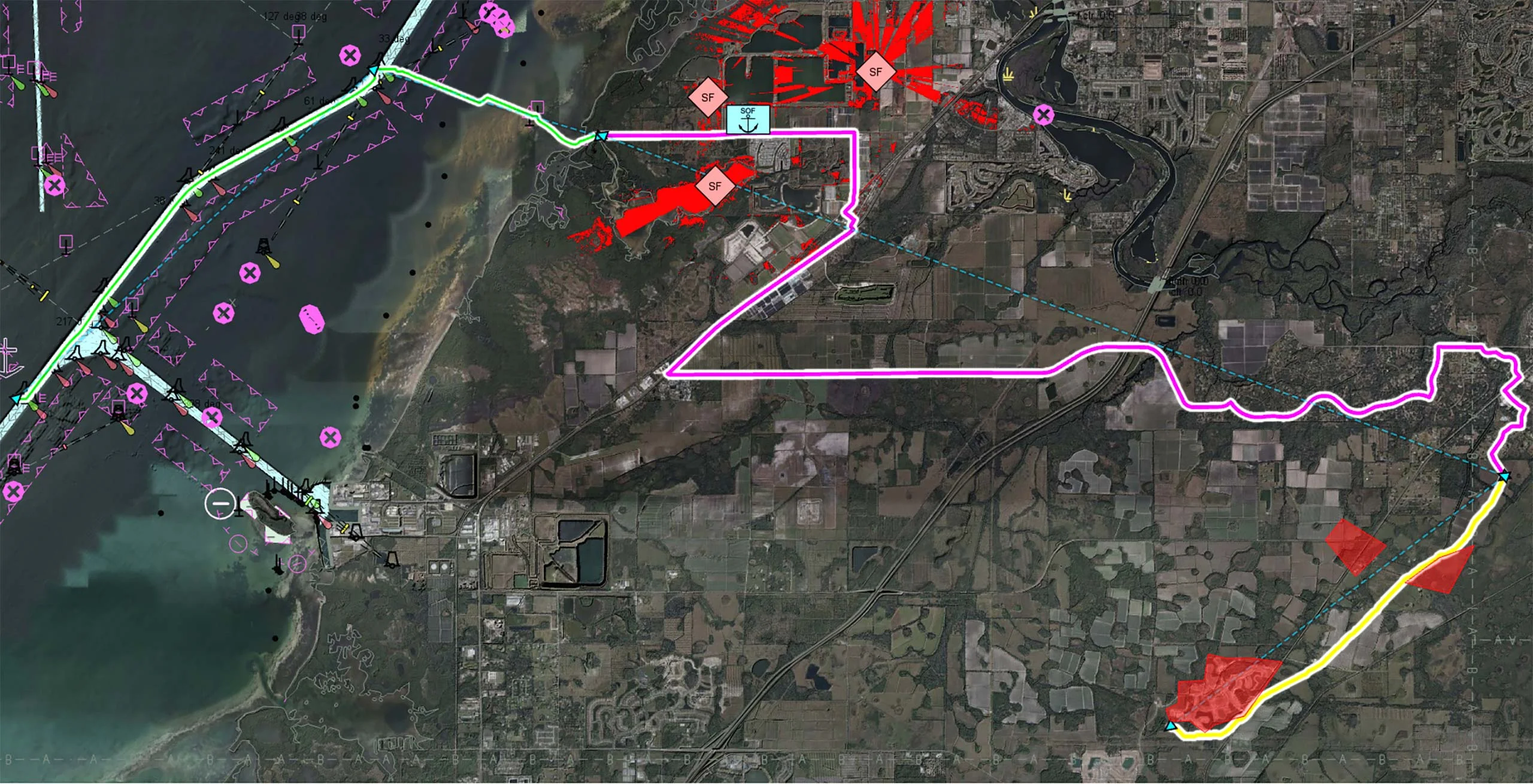
Figure: Two routes visualized on a region-based robustness heat map. The heat map’s coloring ranges from green (good robustness) to red (poor robustness).The blue route values travel time higher while the pink route values robustness higher. As the blue route enters red and yellow areas (denoting poor robustness) the pink route avoids the areas by diverting through terrain and avoids narrow city roads.