Site Selection for UAV Landing, Supply, and Pick-Up
Numerous operational scenarios exist where identifying a safe and accessible landing zone is critical, such as frontline resupply, emergency medical deliveries, and last-mile logistics. These zones must meet a variety of tactical, environmental and logistical criteria to ensure the success of the mission and the safety of the platform.
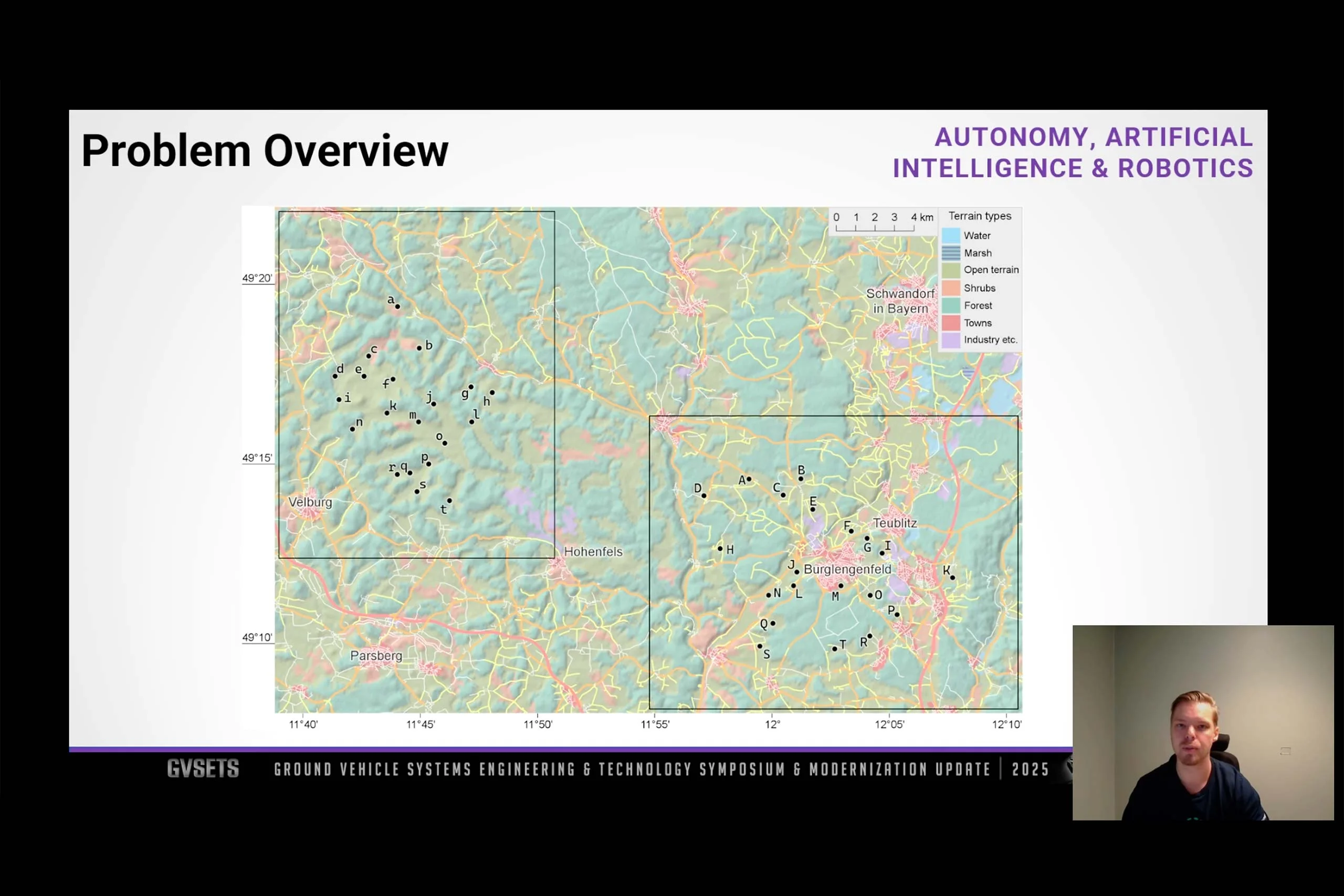
This process is driven by a comprehensive geospatial analysis that integrates various data layers, such as terrain, land use, infrastructure, buildings, roads and 3D models, as well as UAV-specific flight characteristics. The aim is to identify locations that are physically suitable for landing, tactically advantageous, and logistically accessible.
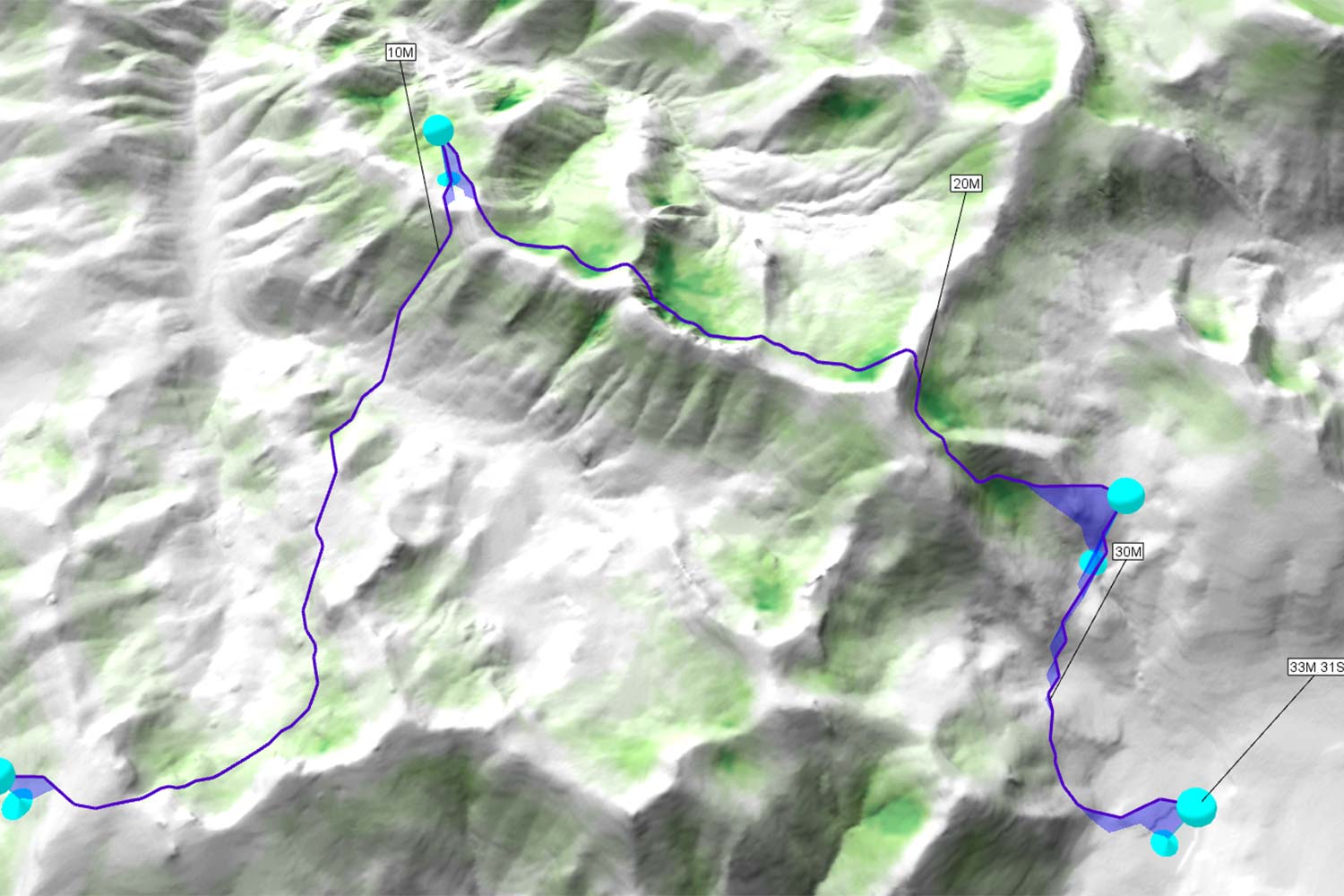
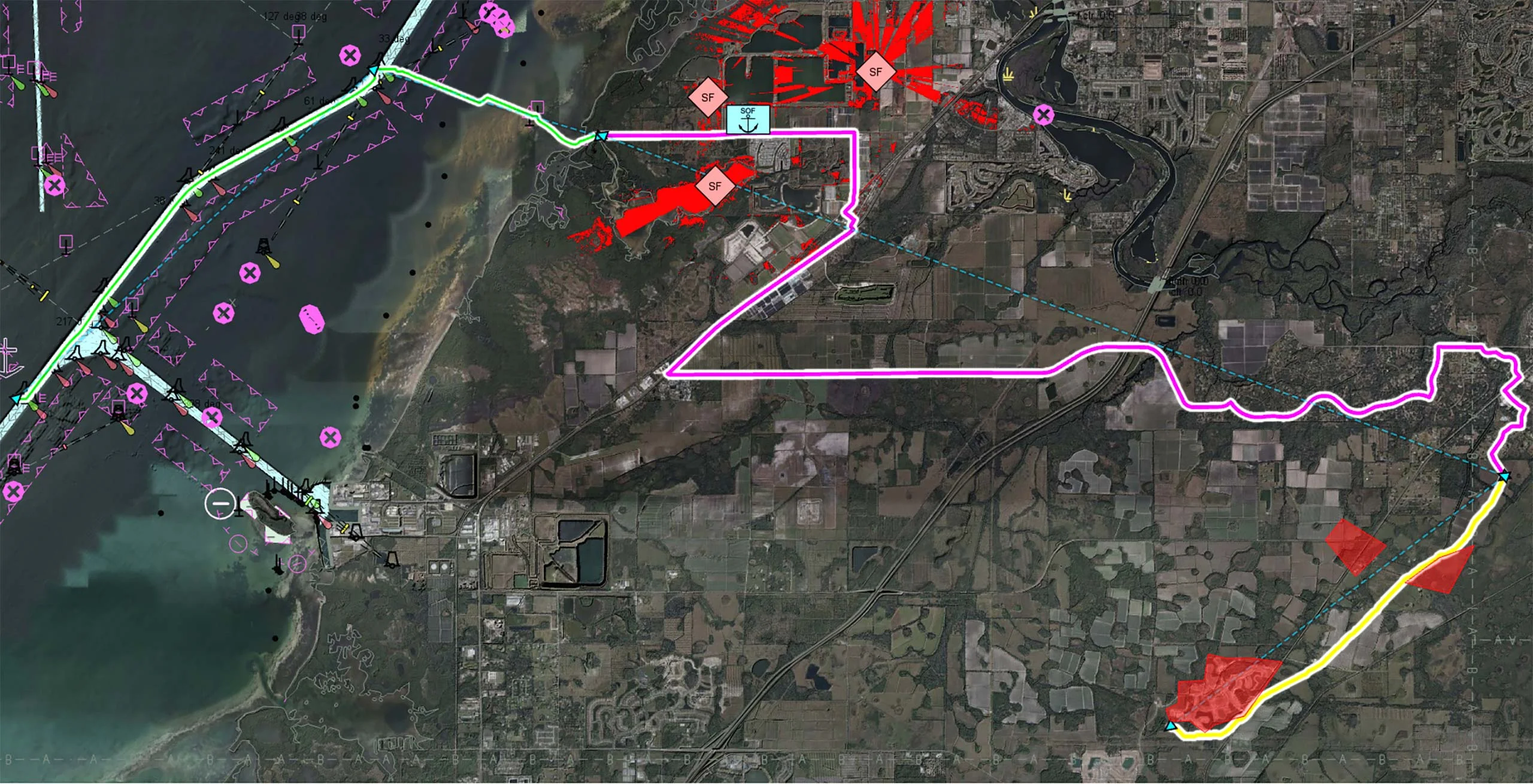
The first step is to analyse terrain data to determine potentially suitable landing areas. In a simplified classification scheme, dense forests are represented by dark green, urban areas by red, bodies of water by blue, and open grasslands by light green. In this example, open grasslands are considered suitable for UAV landings. In real-world applications, however, a much broader and more detailed classification system is employed to reflect the operational environment’s complexity.

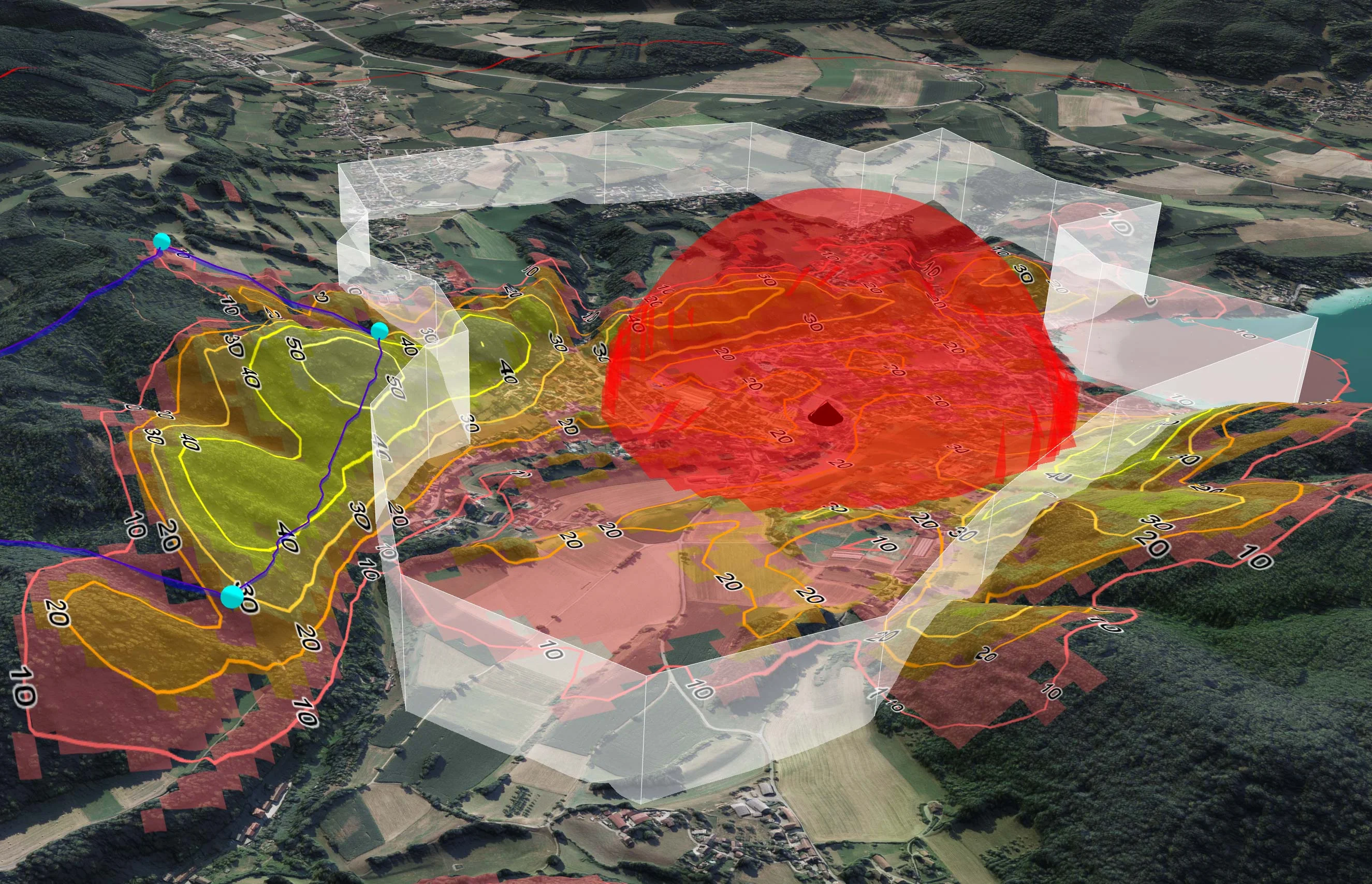
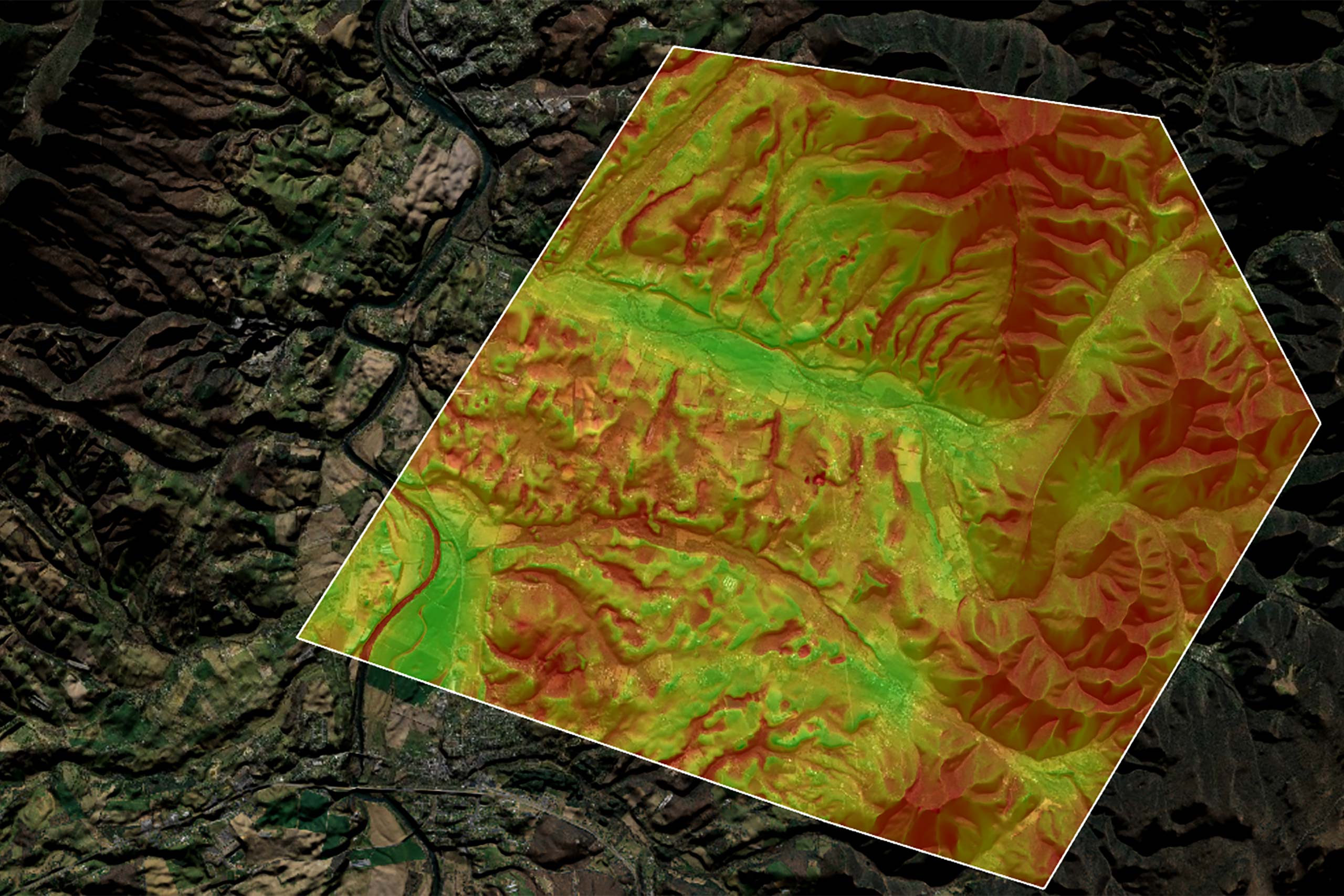
To enhance safety, buffer zones are applied around hazardous terrain types to ensure that UAVs maintain a safe distance from obstacles and high-risk areas. At the same time, elevation data is analysed to exclude areas with steep slopes, since UAVs require relatively flat ground for safe landing. This is achieved by processing digital terrain models (DTMs) to calculate slope gradients and identify sufficiently large, level areas.

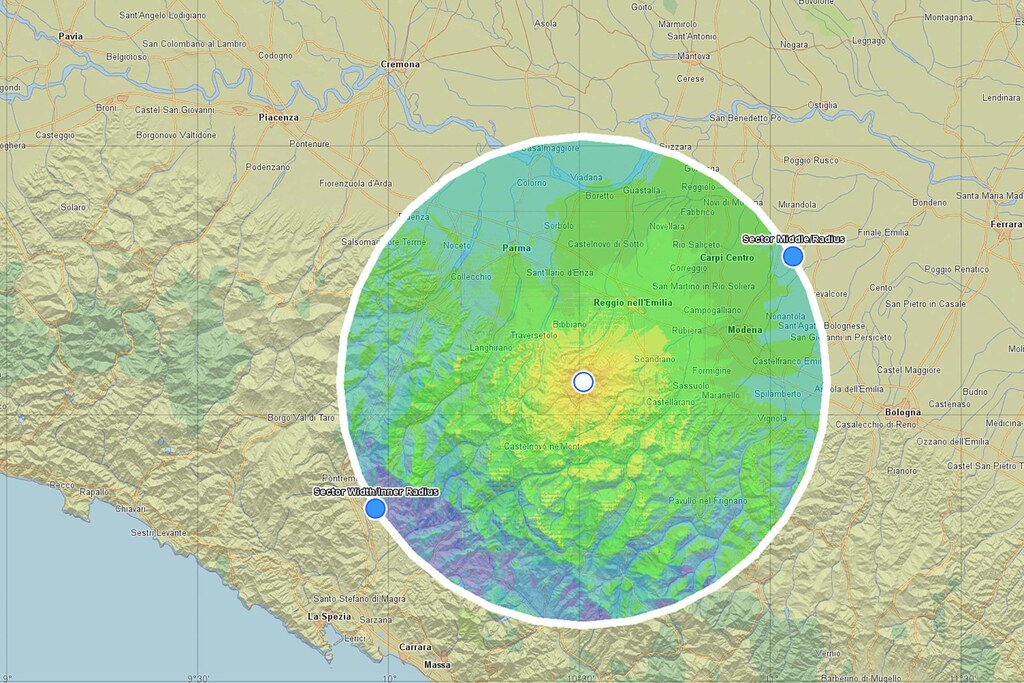
Another critical component is visibility analysis, which assesses how exposed a potential landing zone is to enemy observation. This is usually shown using a visibility index, which is represented by a colour scale ranging from green (high visibility) to red (low visibility). Areas with low visibility from known enemy positions are favoured as they provide natural concealment and reduce the risk of detection during delivery or collection.
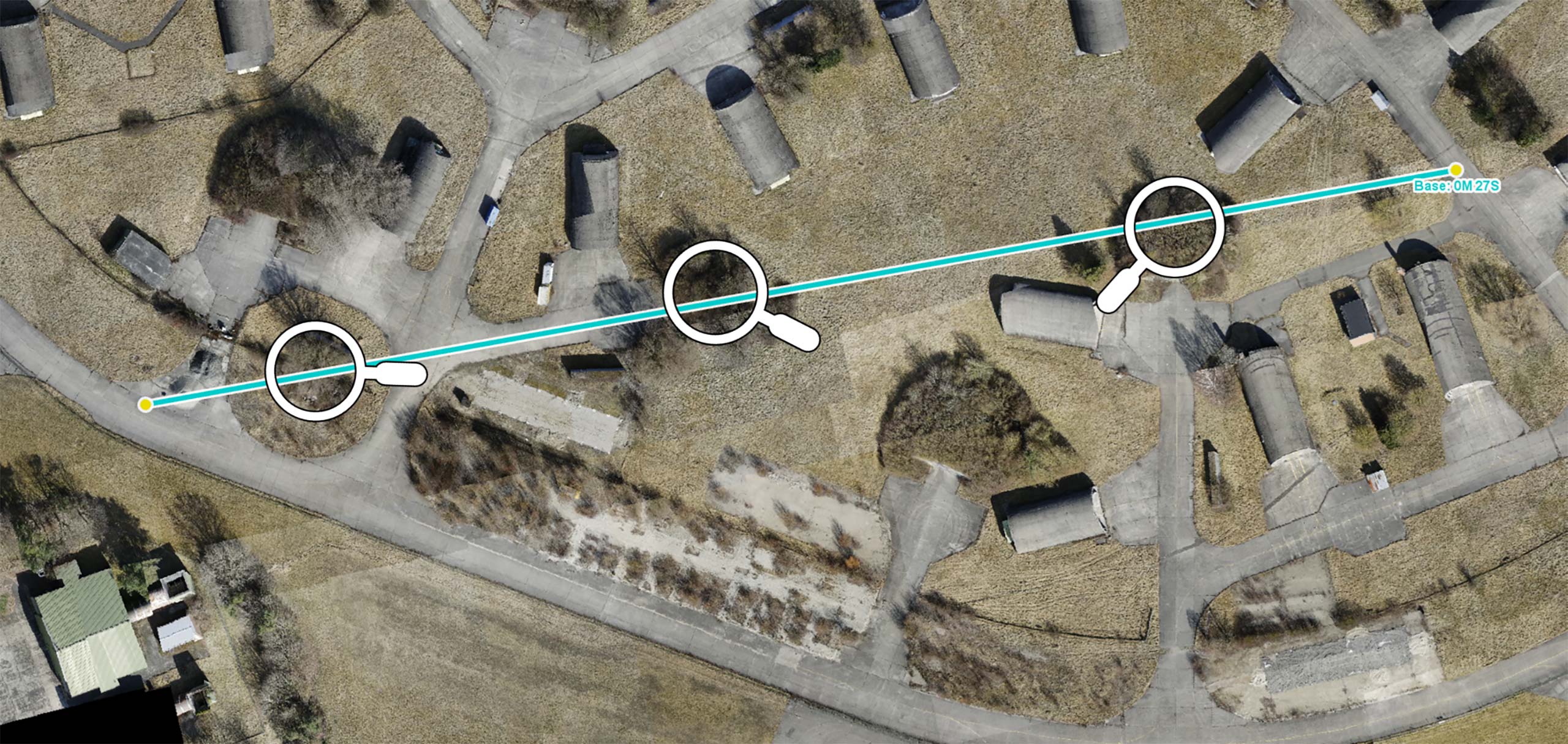
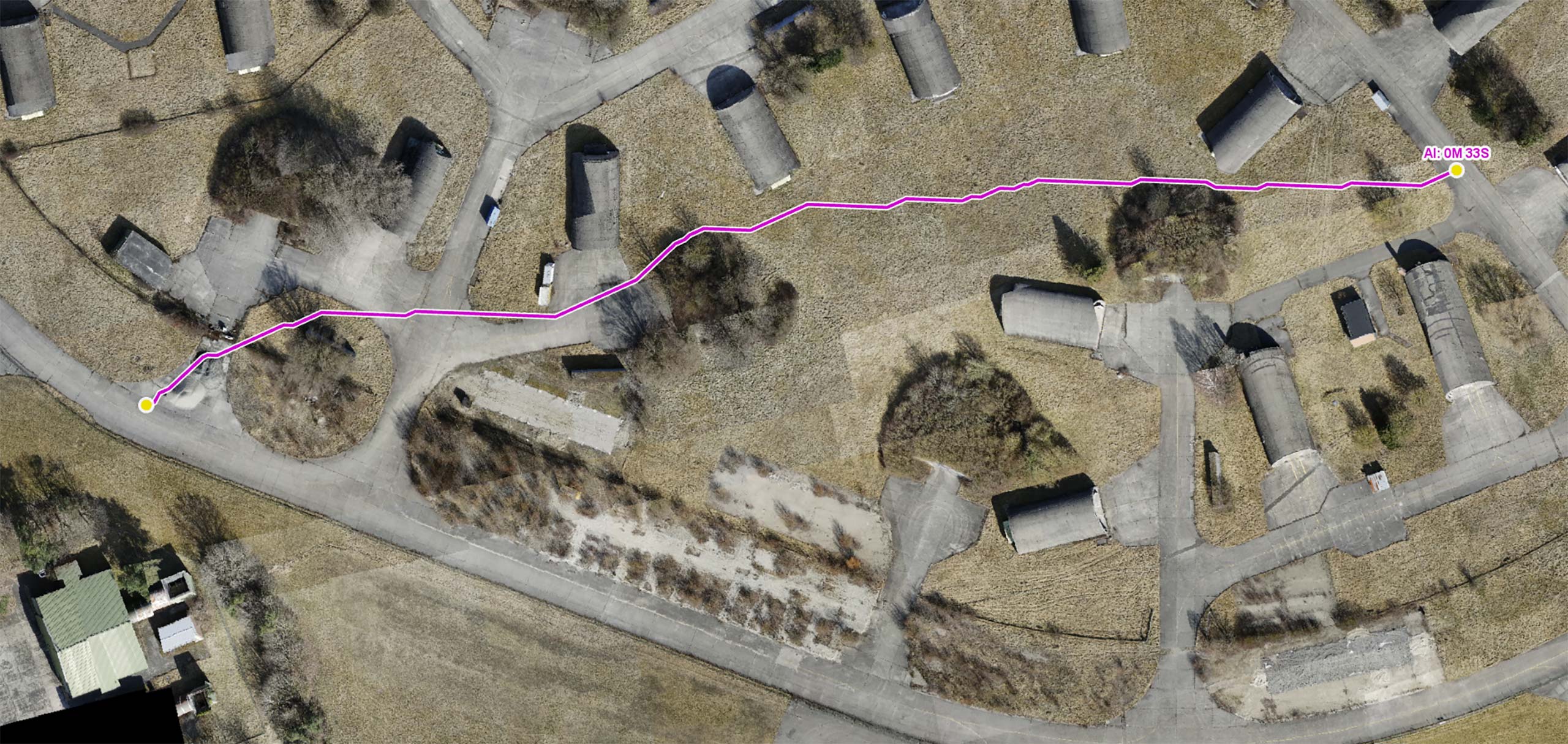
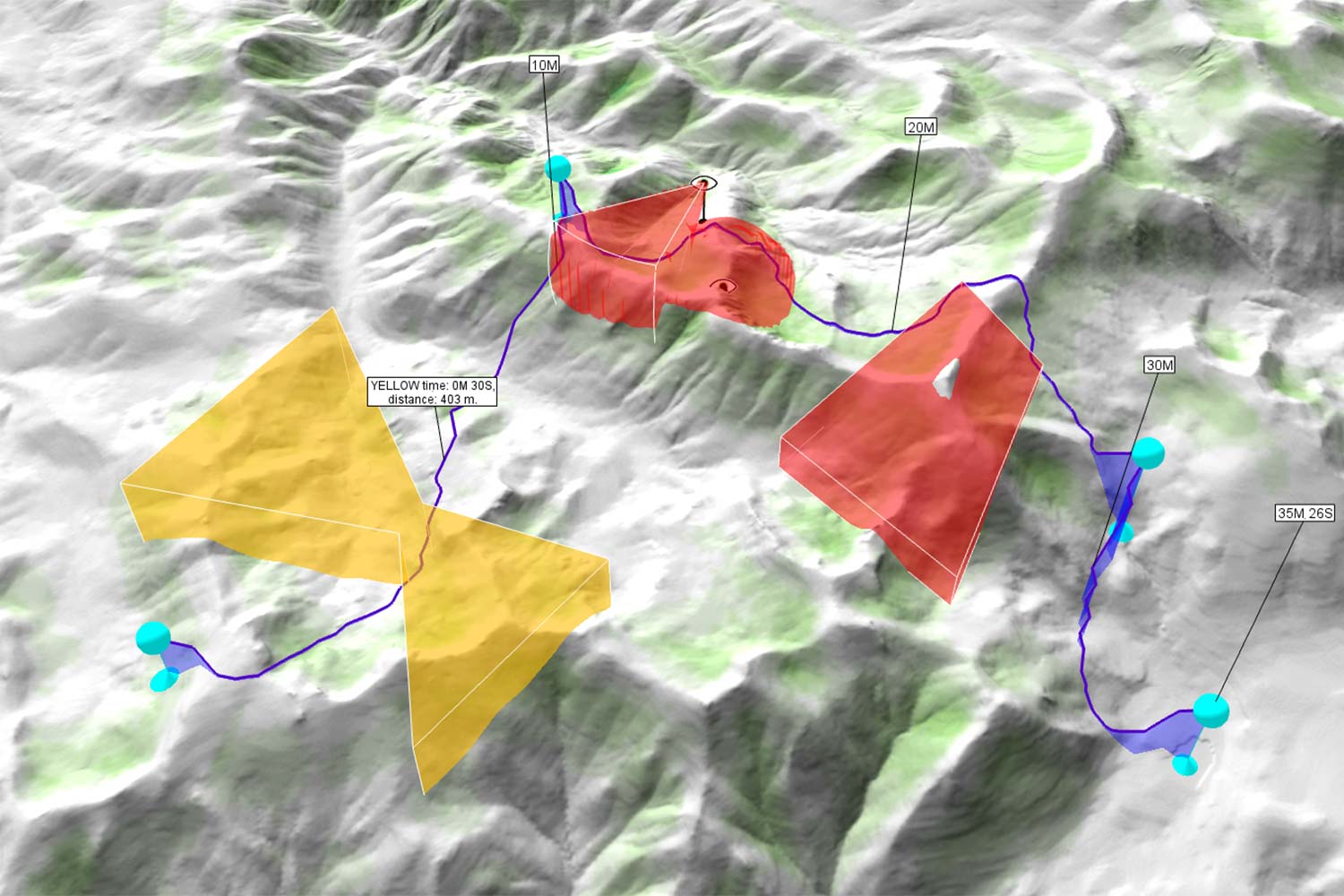
In many operational scenarios, the most effective delivery or collection point is not located directly on the front line. It may therefore be more practical and secure to identify a nearby rendezvous point that is both reachable and tactically advantageous.
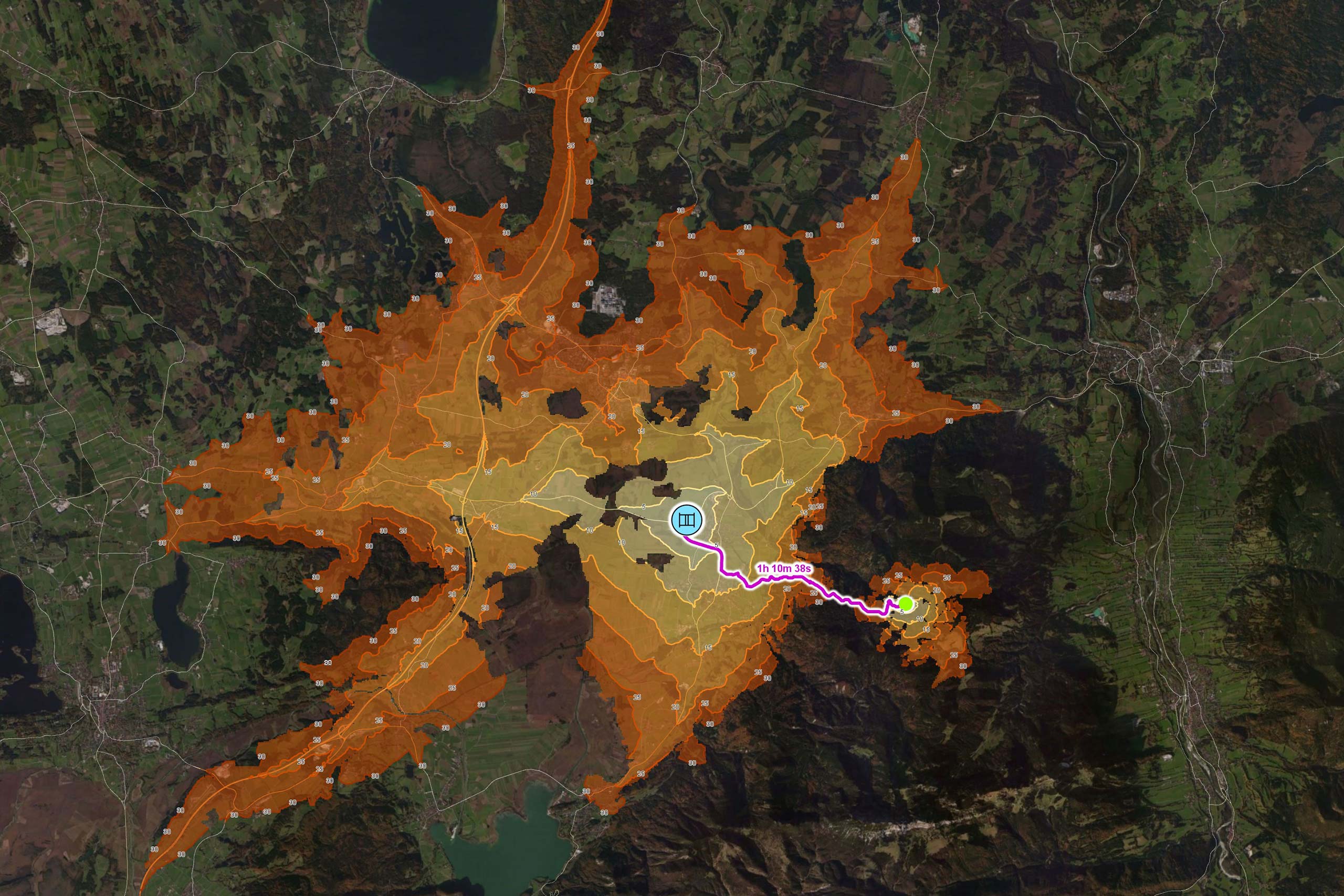
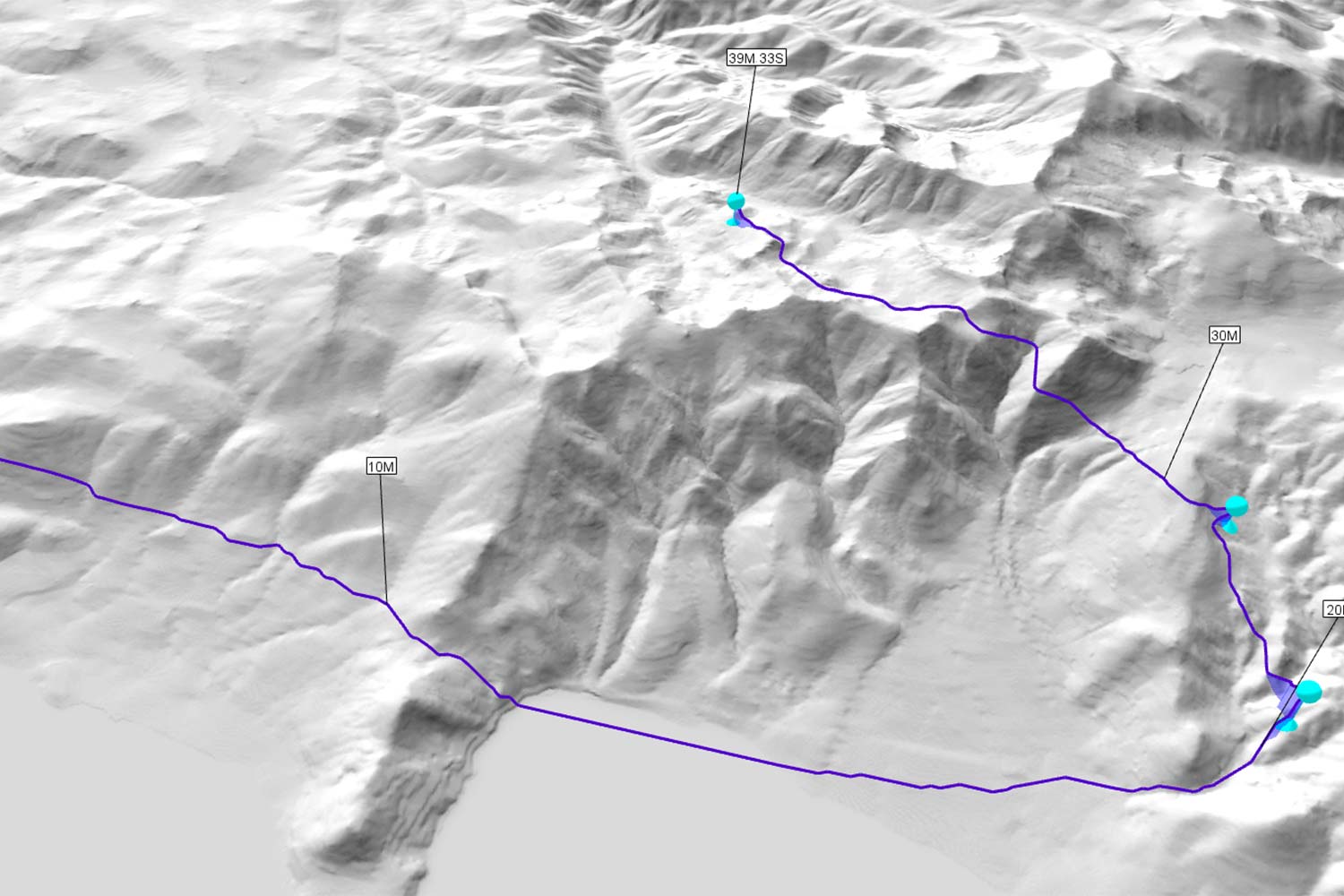
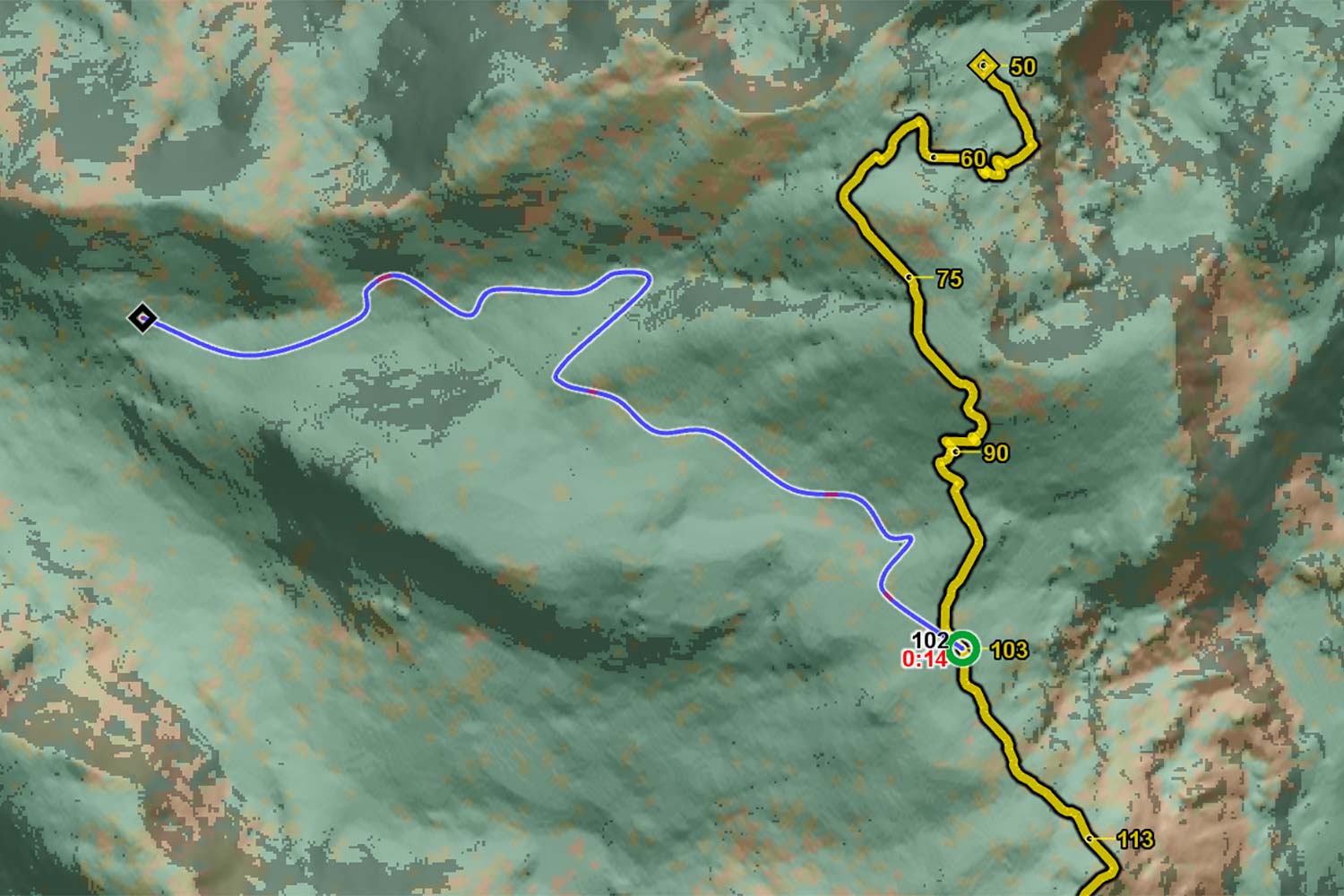
To support this, isochrone analysis is used to visualise travel times from the ground unit’s current location. This enables planners to swiftly determine which potential rendezvous points are accessible within a given timeframe. Overlaying these isochrones onto the operational map enables decision-makers to select the most efficient and secure meeting location.