Optimizing Firing Position Usage in Artillery Shoot-and-Scoot Tactics
Watch our on-demand webinar about shoot-and-scoot tactics using the traveling salesman problem.
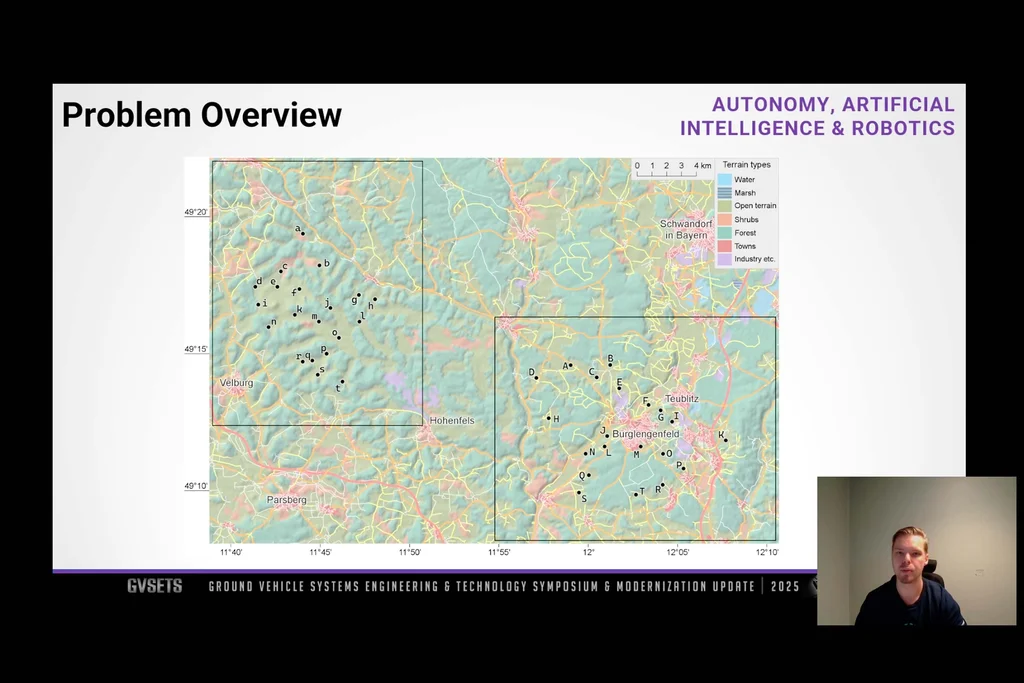
When presented at GVSETS 2025 in August, our technical paper “Optimizing Firing Position Usage for Survivability and Effectiveness in Artillery Shoot-and-Scoot Tactics” was honoured with the Best Paper Award in the Autonomy, Artificial Intelligence & Robotics track.
If you missed the live talk, there is now a chance to watch the full presentation in an on-demand webinar.
The webinar is presented by Thomas Jonsson Damgaard, Developer at Carmenta and Co-author of the paper together with Dr. Mikael Rittri.
Webinar highlights:
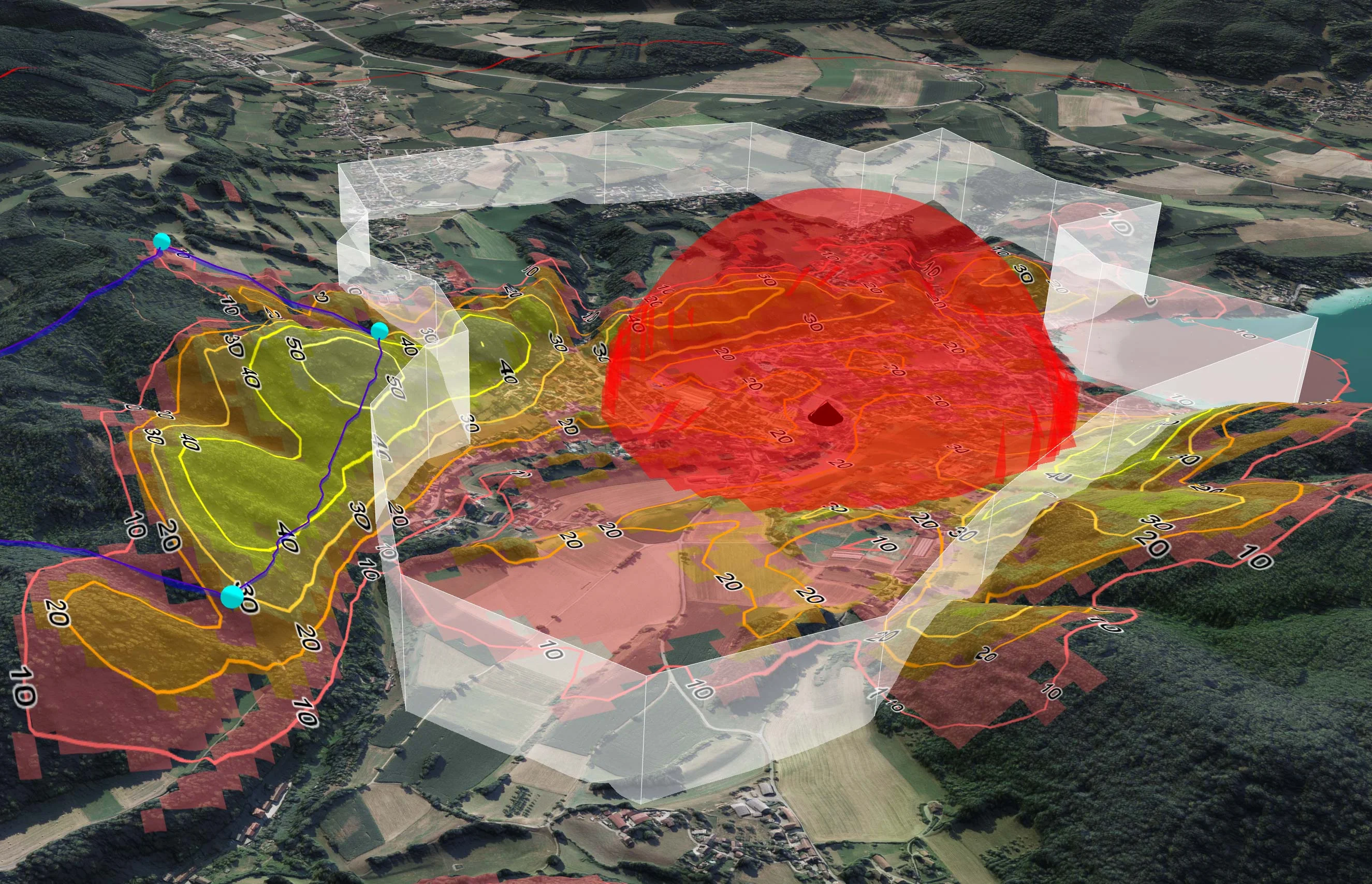
- In shoot-and-scoot tactics, a common rule is that artillery units should not reuse firing positions; a more cautious rule is that they should not even pass near an old firing position when relocating.
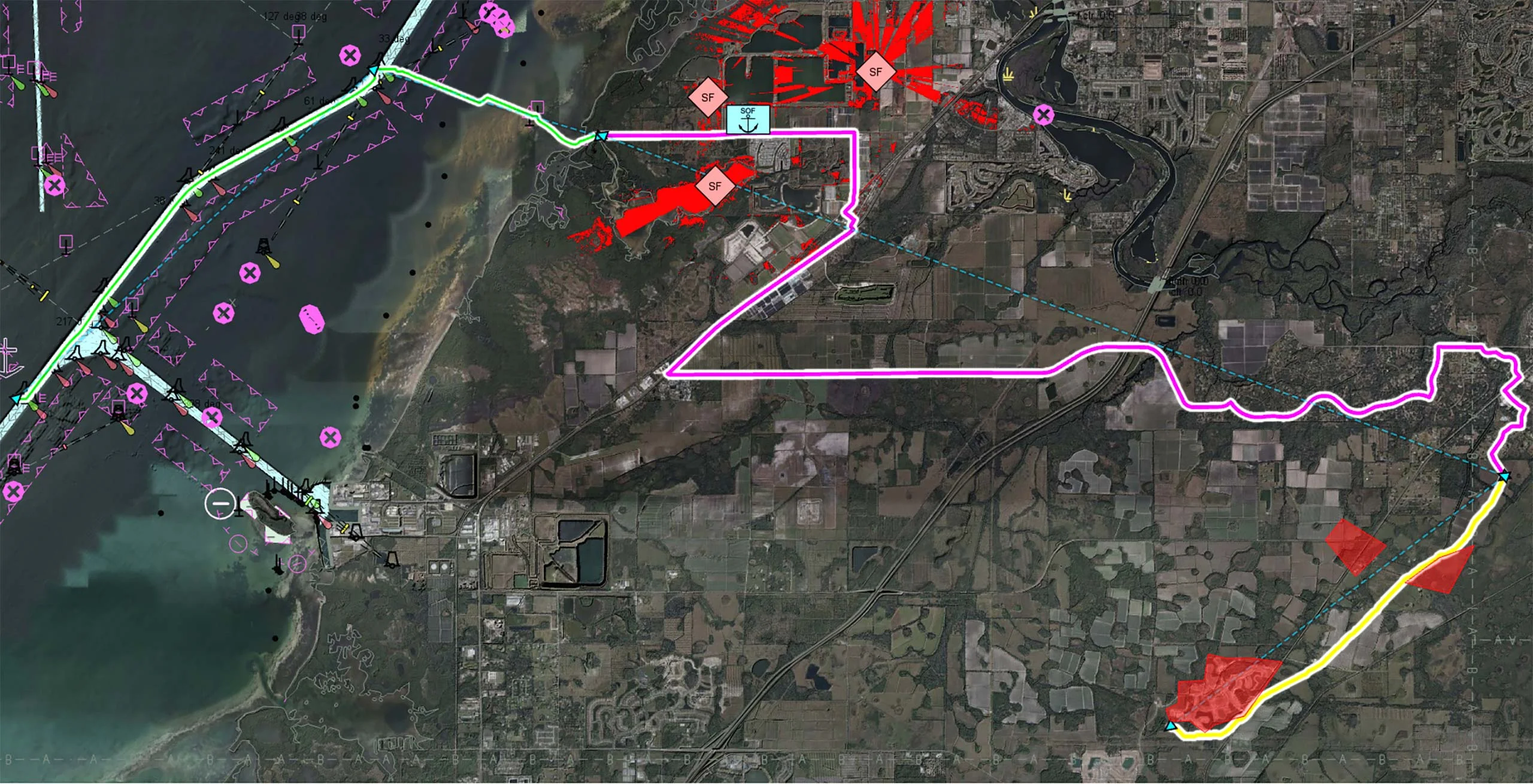
- Learn how we introduced this cautious rule to define a new variant of the traveling salesman problem: maximizing the number of firing positions while minimizing travel time under strict movement constraints.
- Explore our use of greedy and randomised heuristic algorithms and graph theory to optimize movement and performance.
- Discover how our results show that repeated randomized runs yield good solutions quickly, and that problem reduction can further boost performance.
Sign up now
Download the full Whitepaper