Summary
In today’s complex, multi-domain operational environments, success hinges on the ability to coordinate uncrewed air, land and sea systems with precision, autonomy and real-time intelligence. Carmenta’s geospatial technology delivers precisely this.
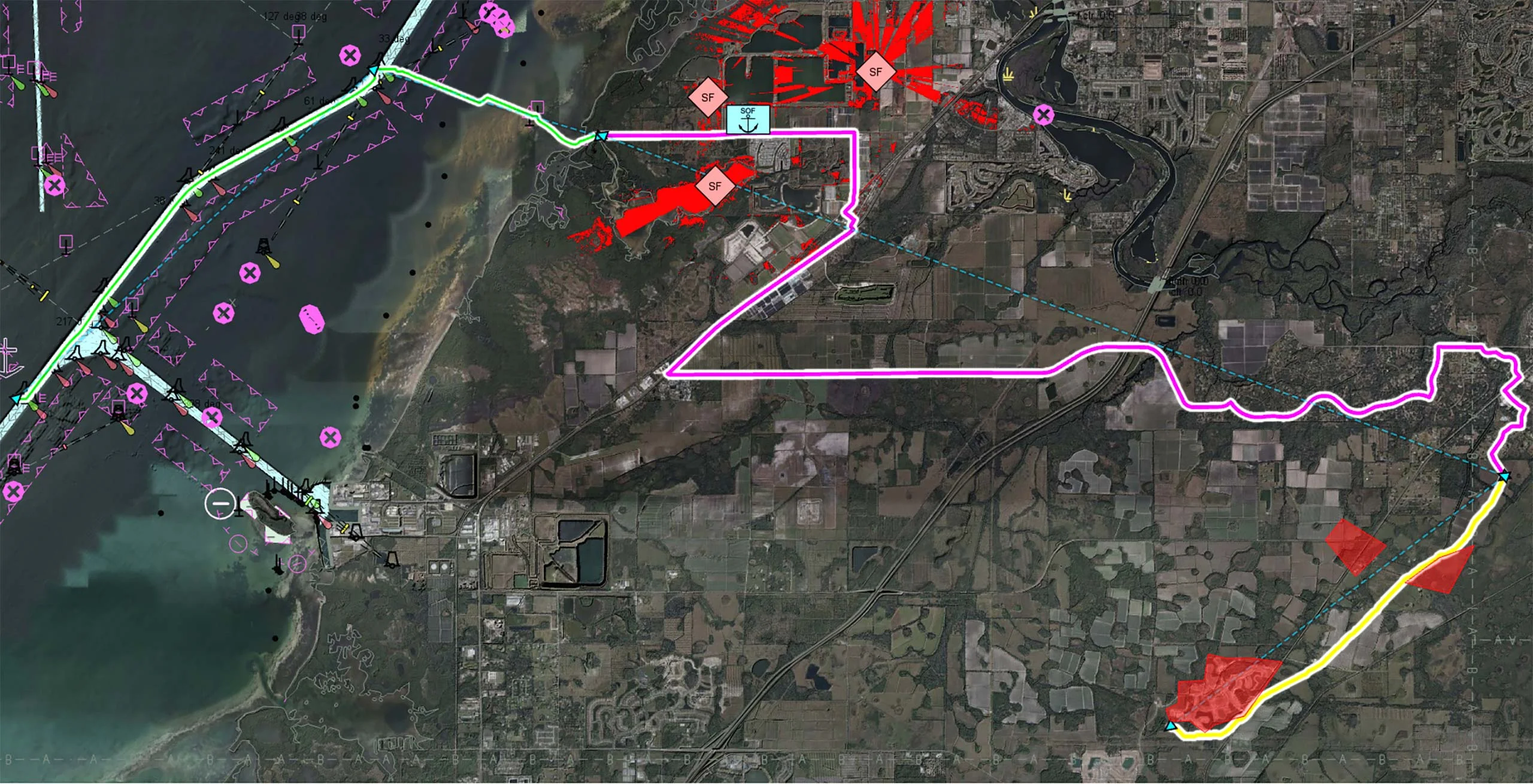
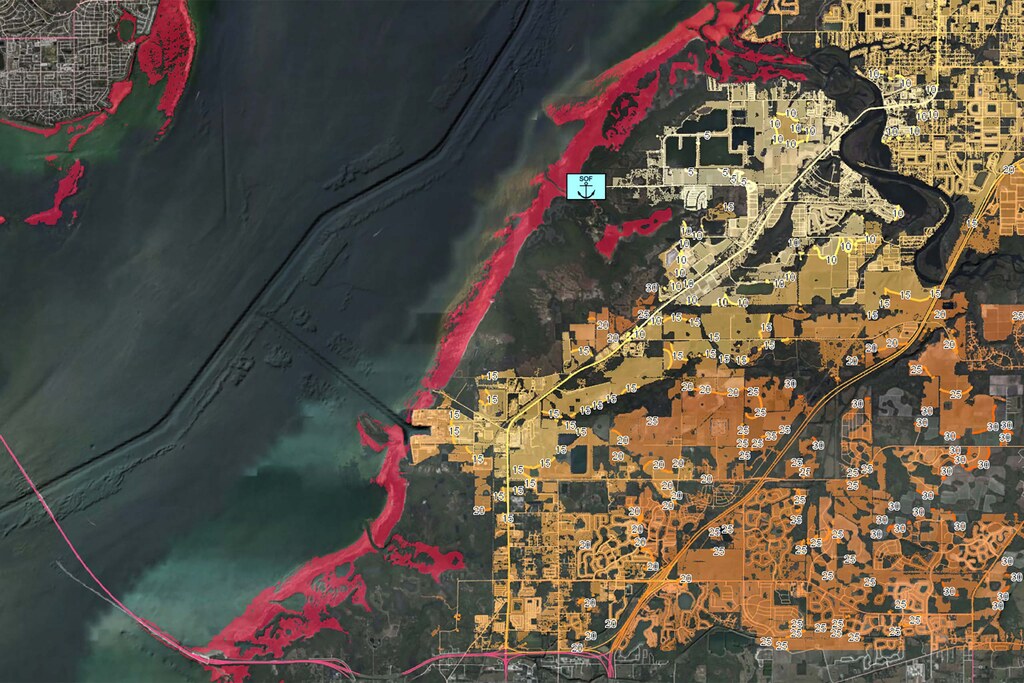
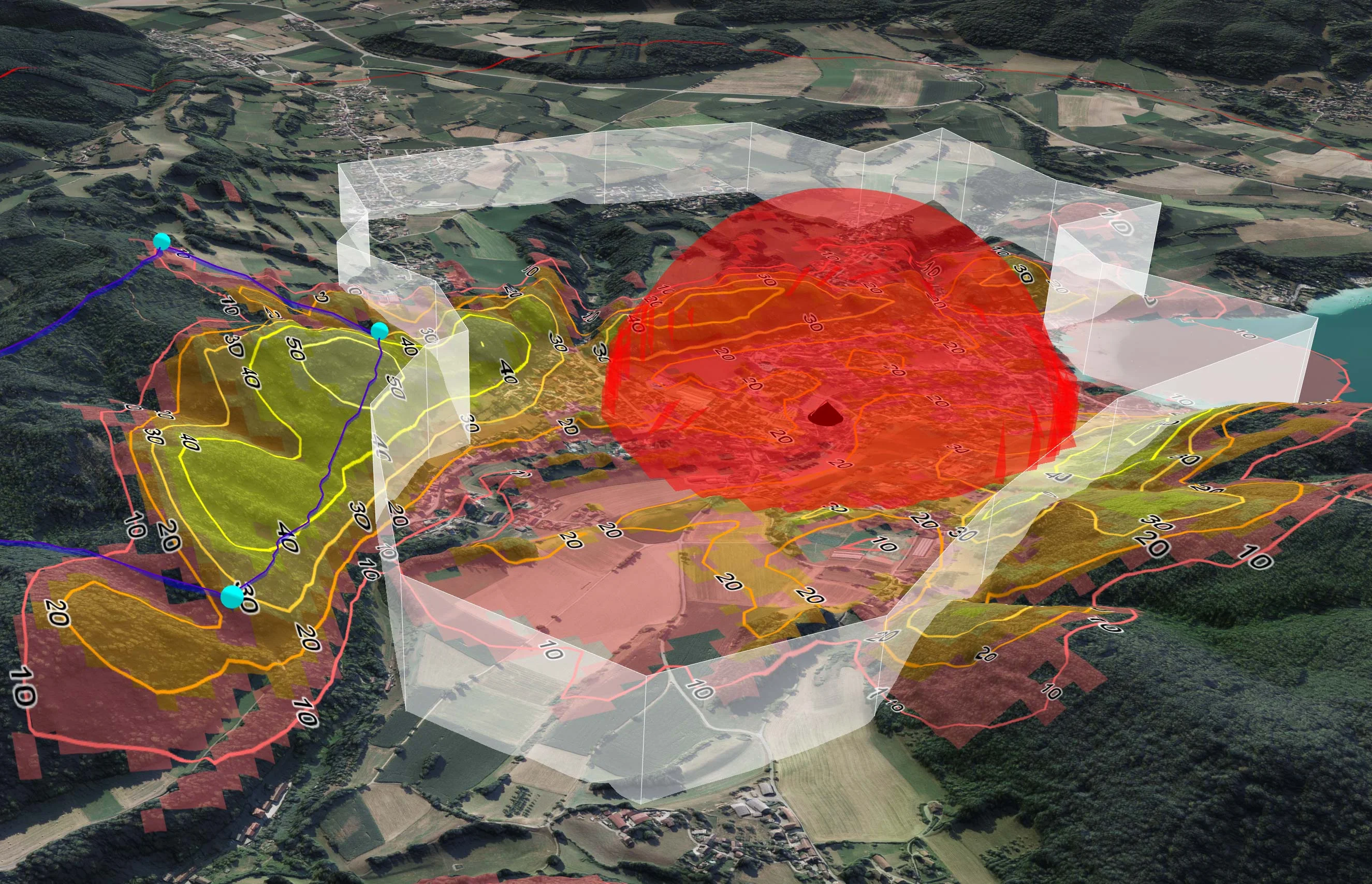
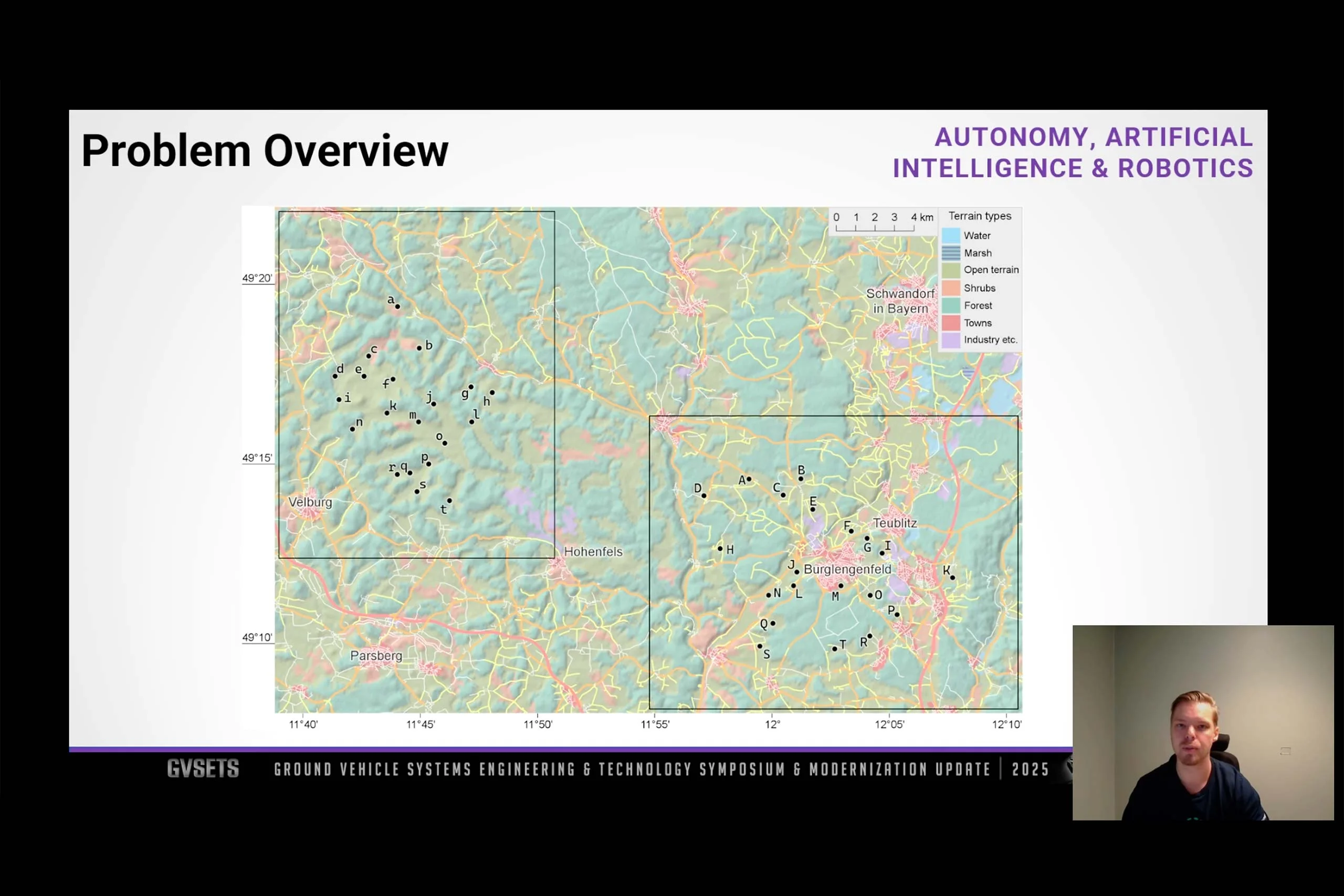
By integrating high-resolution terrain data, maritime charts, threat overlays and dynamic routing capabilities into a unified operational picture, Carmenta enables autonomous decision-making at the edge.
- Autonomous decision-making at the edge.
- Real-time mission adaptability.
- Safe, stealthy and synchronised movement across all domains.
- Seamless interoperability between UxS platforms and command systems.
From nap-of-the-earth UAV routing to UGV terrain navigation and USV coastal operations, Carmenta empowers defence forces to act faster, smarter and safer, even in the most contested and disconnected environments.
In short, Carmenta transforms geospatial data into a decisive operational advantage, making it an essential enabler of next-generation UxS missions.