
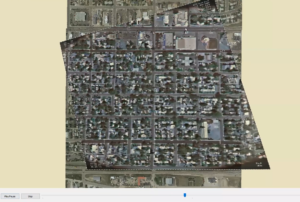
 A screenshot from the prototype application developed in the thesis, showing a video stream very accurately overlaid onto a satellite image.
A screenshot from the prototype application developed in the thesis, showing a video stream very accurately overlaid onto a satellite image.Summary of results
This thesis presents a method for automatic location detection in aerial photographs using databases of aerial photographs and satellite images. The proposed pipeline is based on an initial round of tests, performed by using existing feature detection, description and matching algorithms on aerial photographs with a high degree of similarity. After which further modifications and improvements were implemented to make the method functional also for handling aerial photographs with a high level of inherent differences, e.g., viewpoint changes, different camera- and lens parameters, temporary objects and weather effects.
The method is shown to yield highly accurate results in geographical regions containing features with a low level of ambiguity, and where factors like viewpoint difference are not too extreme. In particular, the method has been most successful in cities and some types of farmland, producing very good results compared to methods based on camera parameters and GPS-location, which have been common in automatic location detection previously. Knowledge of these parameters is not necessary when applying the method, making it applicable more generally and also independently of the precision of the instruments used to determine said parameters.
Furthermore, the approach is extended for automatic processing of video streams. With lack of available ground truth data, no definite conclusions about absolute accuracy of the method can be drawn for this use case. But it is nevertheless clear that processing speeds can be greatly improved by making use of the fact that subsequent video snapshots have a large graphical overlap. And it can indeed also be said that, for the tested video stream, using a type of extrapolation can greatly reduce the risk of graphical noise making location detection impossible for any given snapshot.
More information
Nilsson, Niklas. Feature Detection for Geospatial Referencing. 2019, http://urn.kb.se/resolve?urn=urn:nbn:se:umu:diva-159809.