Automated decision support for placing terrain observers
Master’s Thesis in cooperation with KTH, the Royal Institute of Technology in Stockholm, Sweden.
Background
Access to reliable information is key for military decision-making. Reconnaissance assets are used to gather information about the Operational Environment. These assets need to be placed within the terrain so that they can see as much of the area of interest as possible. The manual task of placing assets within the terrain is a time-consuming task.
This thesis examines the design for a system that could be used to generate candidate placement positions to aid the decision-maker. The system’s task is to find positions that maximise visual cover, while keeping the assets as safe as possible. The problem was formalised and reformulated into a multi-objective optimisation problem.

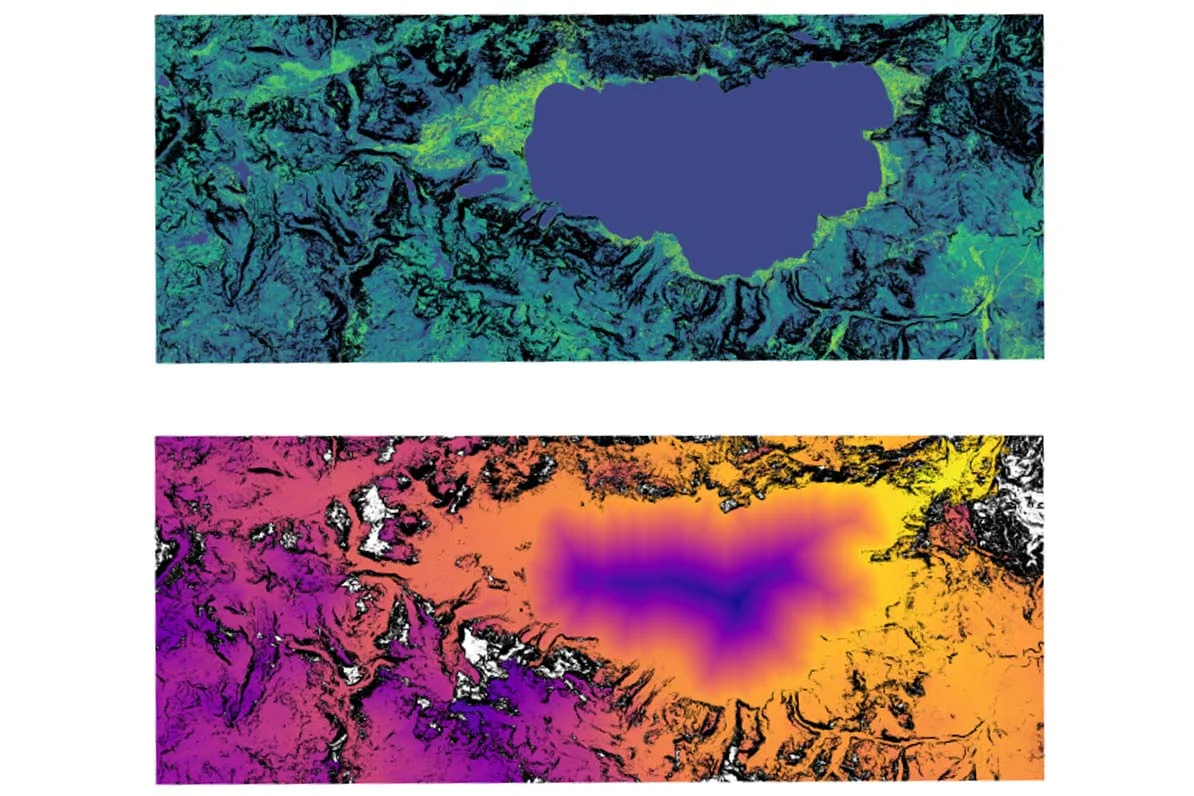
A screenshot from the prototype application developed in the thesis, showing four observers strategically placed to observe as much as possible of the lake in the center of the map.