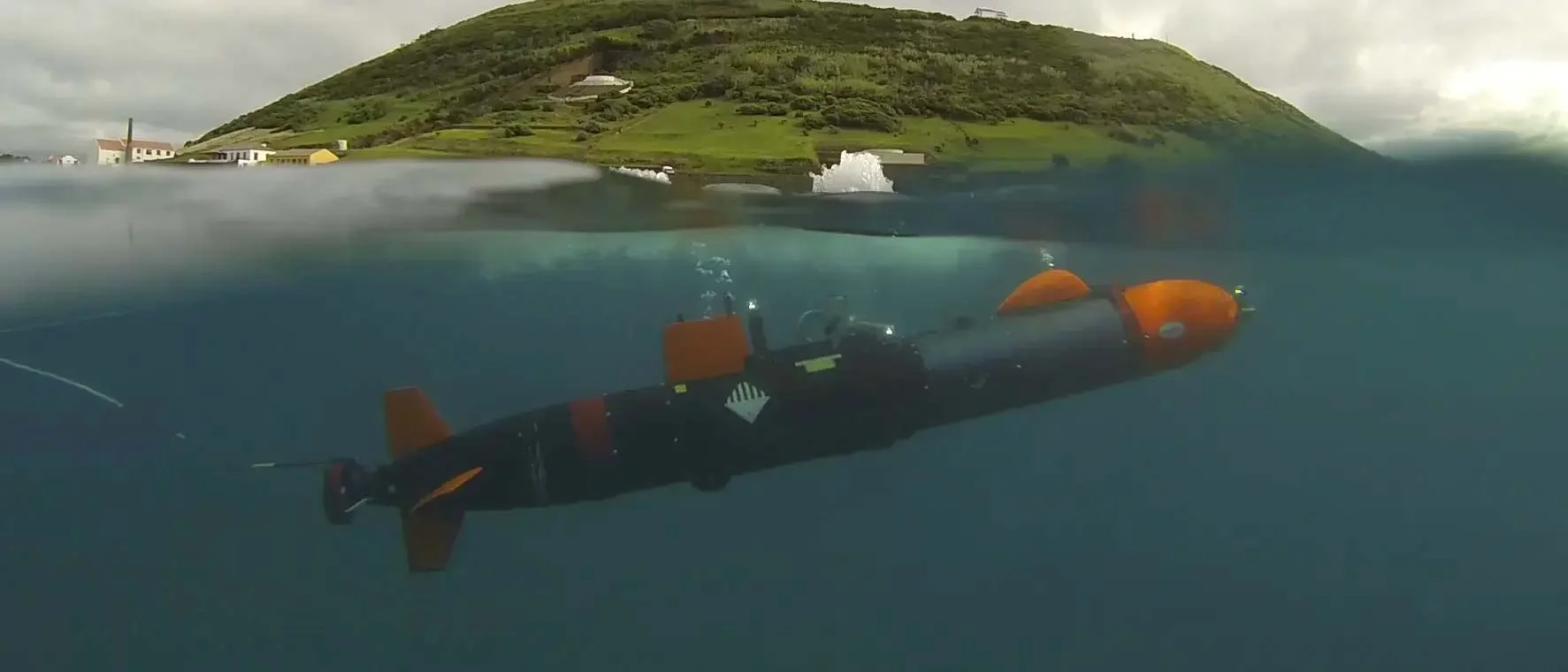
The SeaCat is a hybrid autonomous underwater vehicle (AUV) system designed for a wide range of missions, including hydrographic surveys, real-time data transmission, and detailed mapping of underwater structures. It can operate in unsupervised autonomous mode or as a remotely controlled vehicle (ROV).
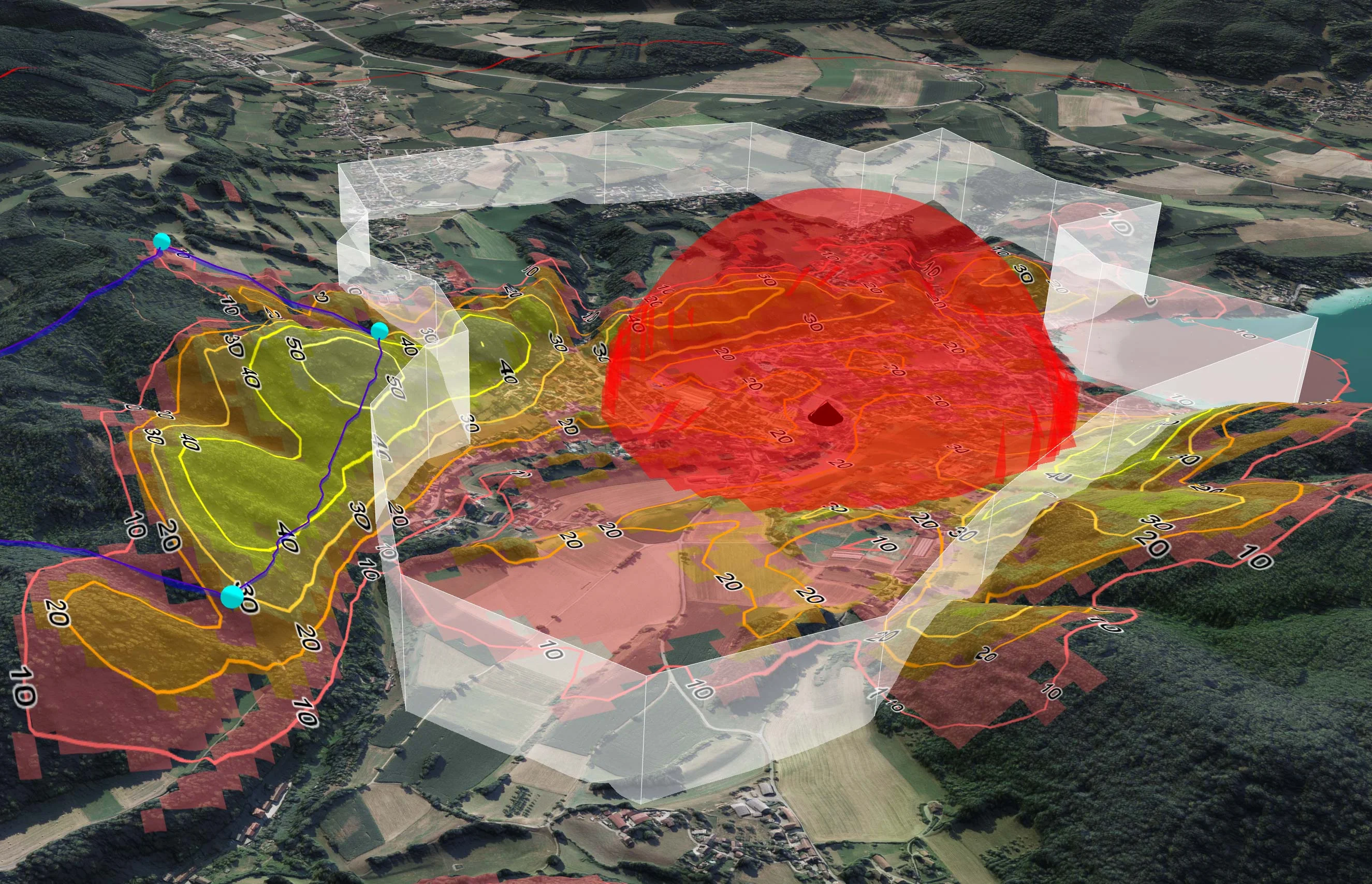
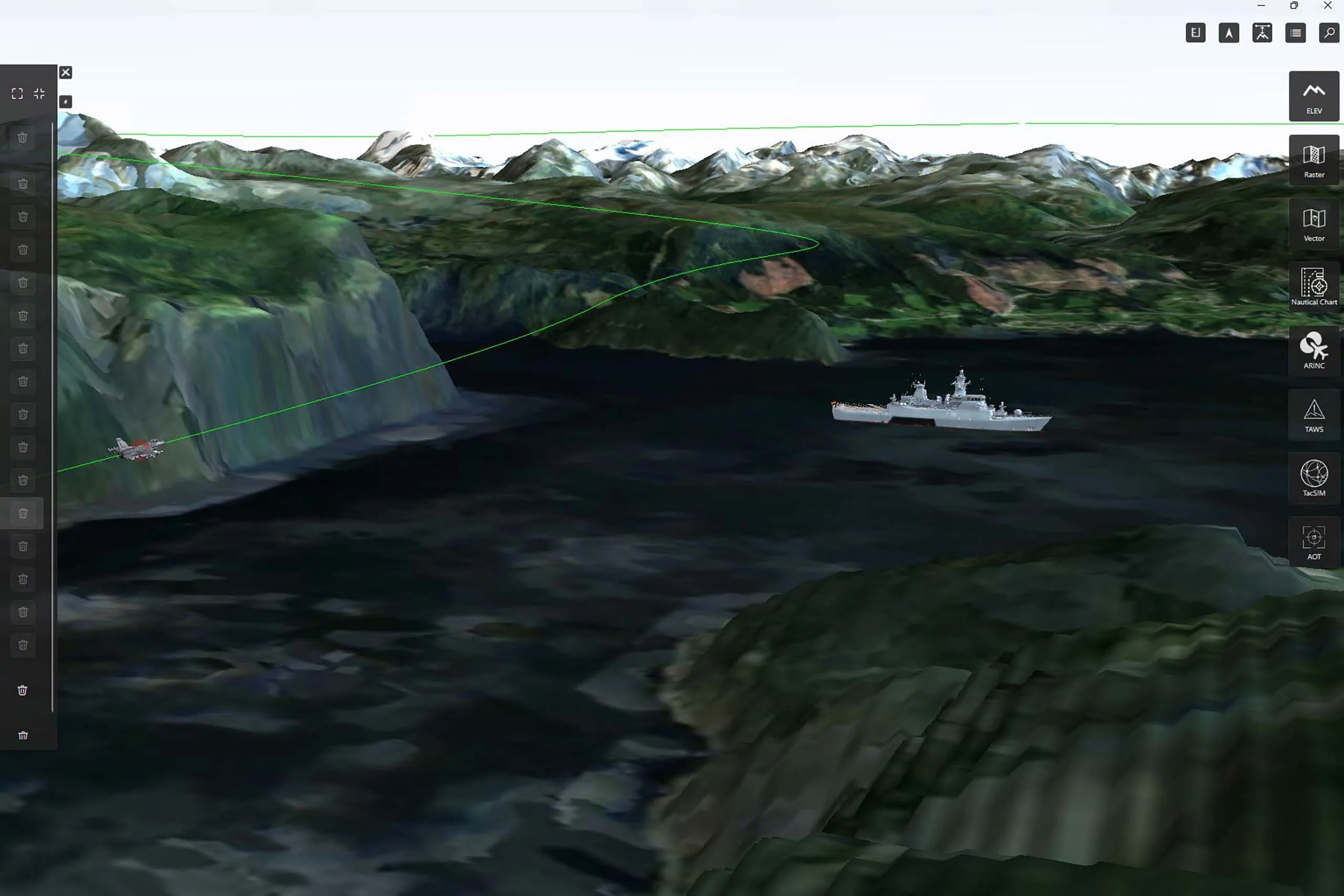
Carmenta’s technology supports SeaCat operators by providing situational awareness through advanced real-time geospatial analysis.
The field of uncrewed systems is experiencing rapid advancements, with significant progress being made in autonomous operations across various environments. Whether in the air, on land, or underwater, Carmenta is committed to advancing technology and supporting our partners in their missions.