
Carmenta in drone exercise during Aurora 26
As part of Project Demo UCAV, Carmenta is proud to have participated in a drone exercise during Aurora 26, where its technology was used for UAS routing and mission planning.
Read more13–15 August, we exhibited at GVSETS 2024. For the second consecutive year, we had a Technical Paper selected for presentation at the Autonomy, Artificial Intelligence & Robotics (AAIR) Technical Session at GVSETS. Thank you to everyone who attended our presentation and who visited our booth for great discussions.
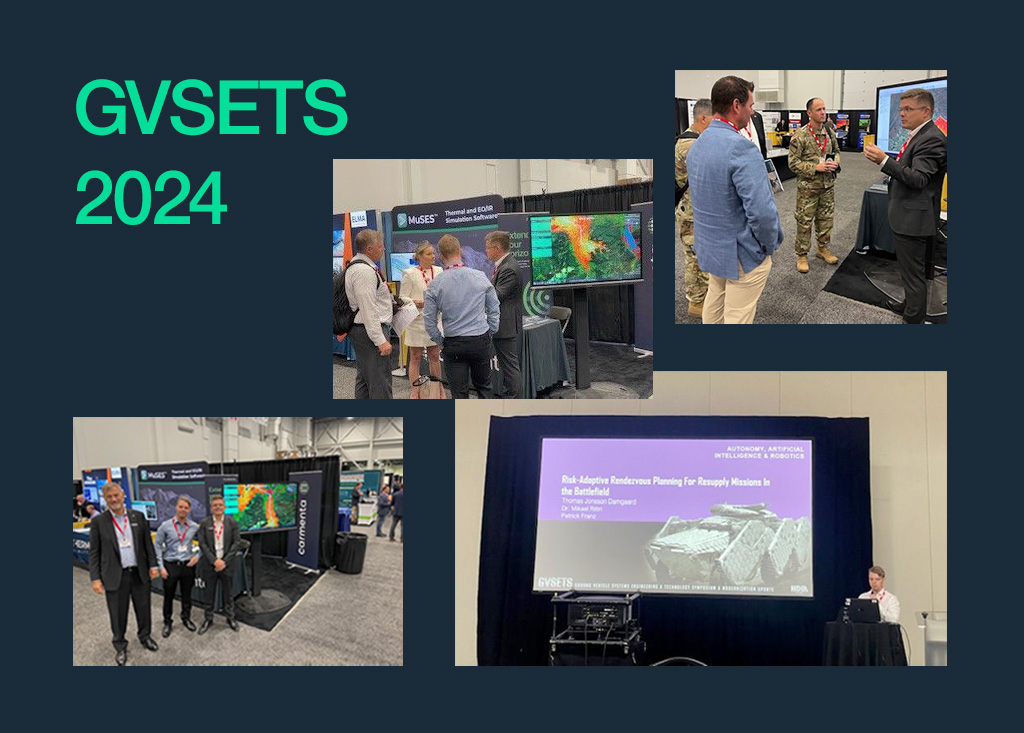
This year’s technical paper focused on ‘Risk-adaptive rendezvous planning for resupply missions in the battlefield’.
In our session at GVSETS, we presented a resupply path planning algorithm, the Adaptive Intercepting Path Planning (AIPP) algorithm, that balances risk and travel time to find the most suitable rendezvous point among several. The algorithm provides the users with important information about the level of risk associated with the selected path, and supports frontline operations and enhances real-time combat effectiveness.
Read more and download whitepaper
Subscribe to our newsletter to receive:
Sign up today to get the latest geospatial technology updates and insights!
As part of Project Demo UCAV, Carmenta is proud to have participated in a drone exercise during Aurora 26, where its technology was used for UAS routing and mission planning.
Read more
Carmenta is proud to participate in NATO's Coalition Warrior Interoperability Exercise (CWIX 2026) in collaboration with Allied Armed Forces, and to contribute to this collaborative effort.
Read more
There is no reason why the map display in a mission-critical system should be any less responsive or visually appealing than the map on a smartphone. In our latest article, we outline 7 core geospatial requirements for mission-critical applications, and how Carmenta technology can meet these needs.
Read more