Obstruction Analysis
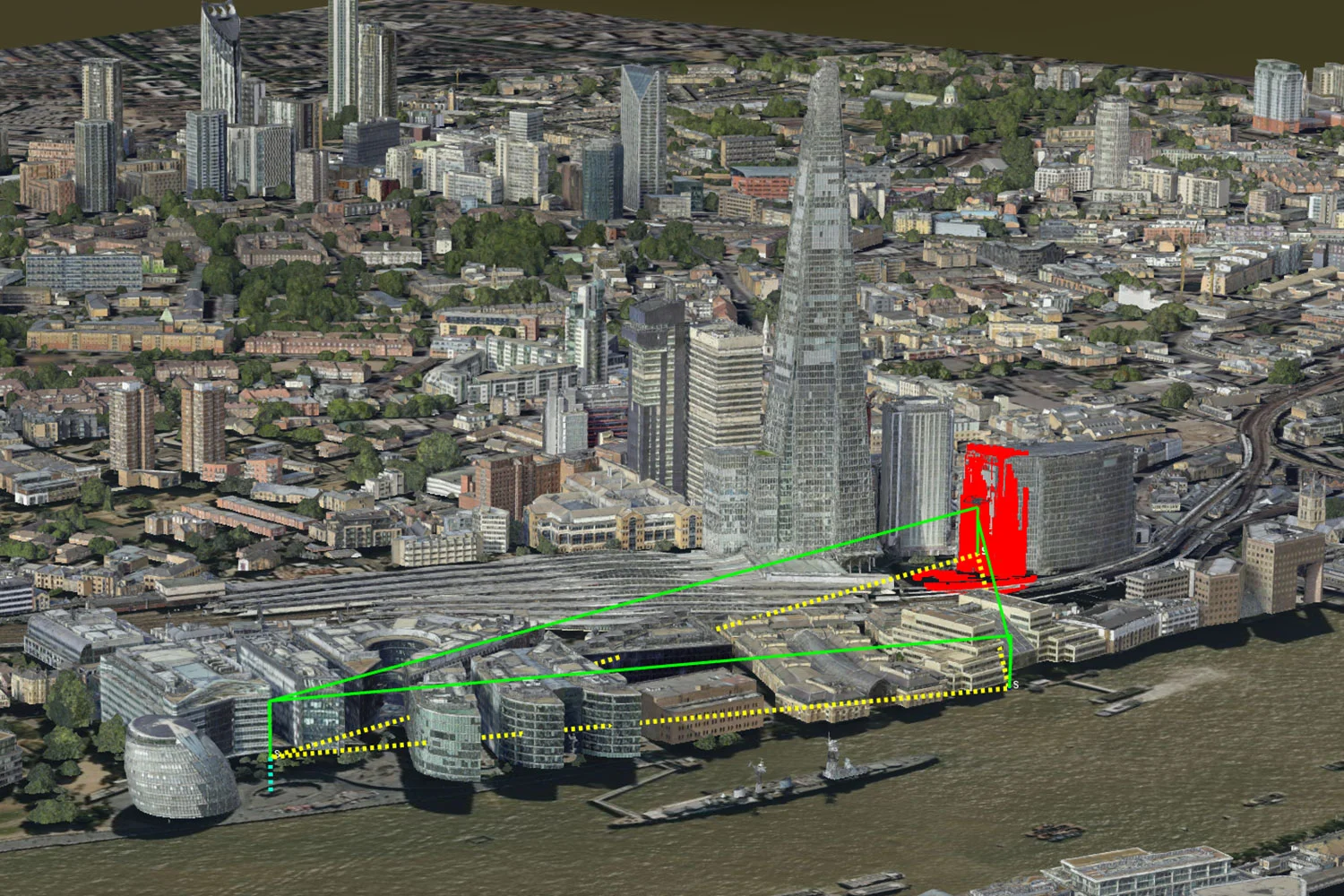
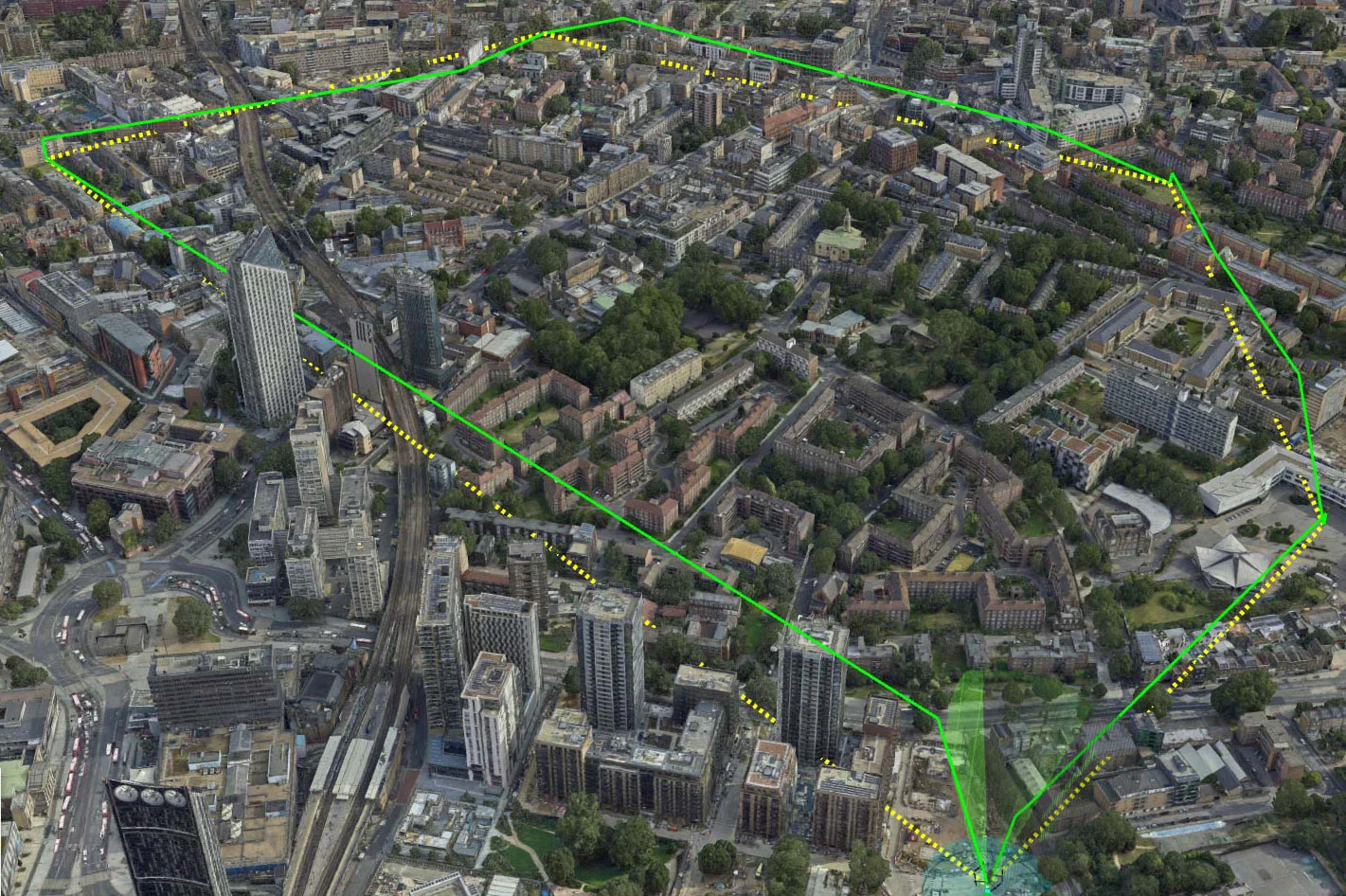
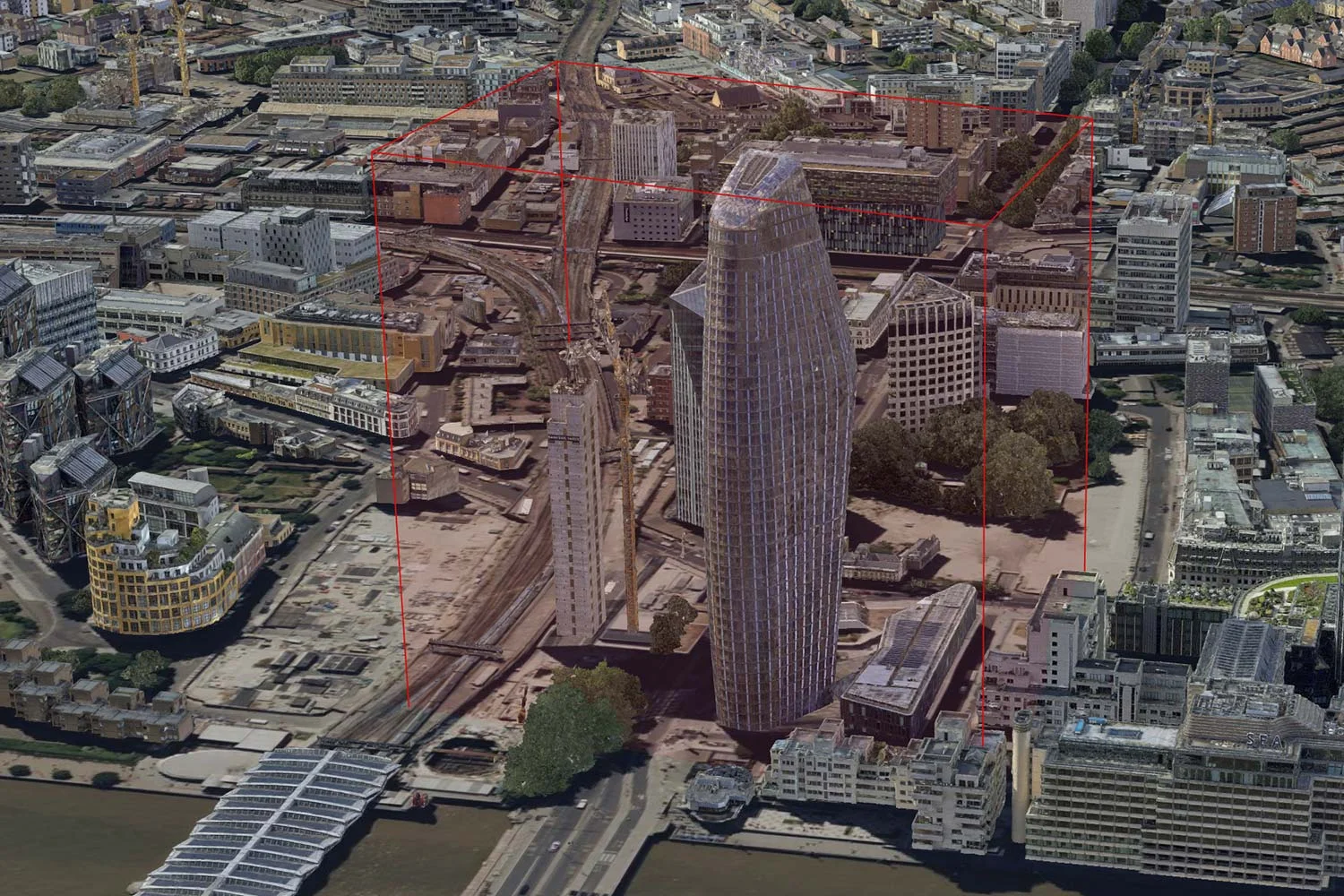
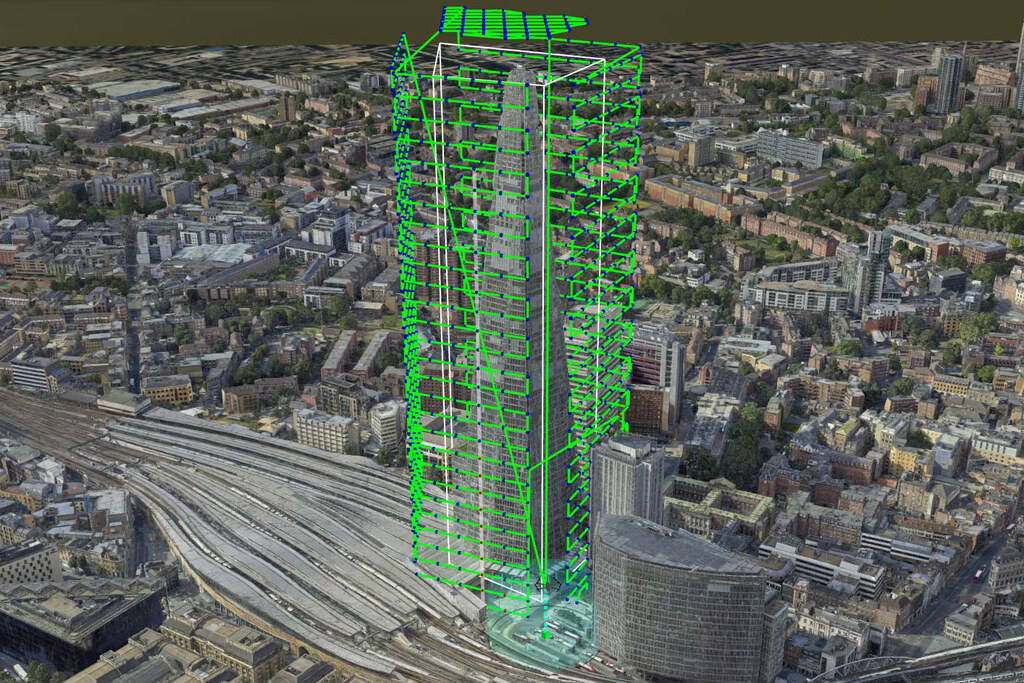
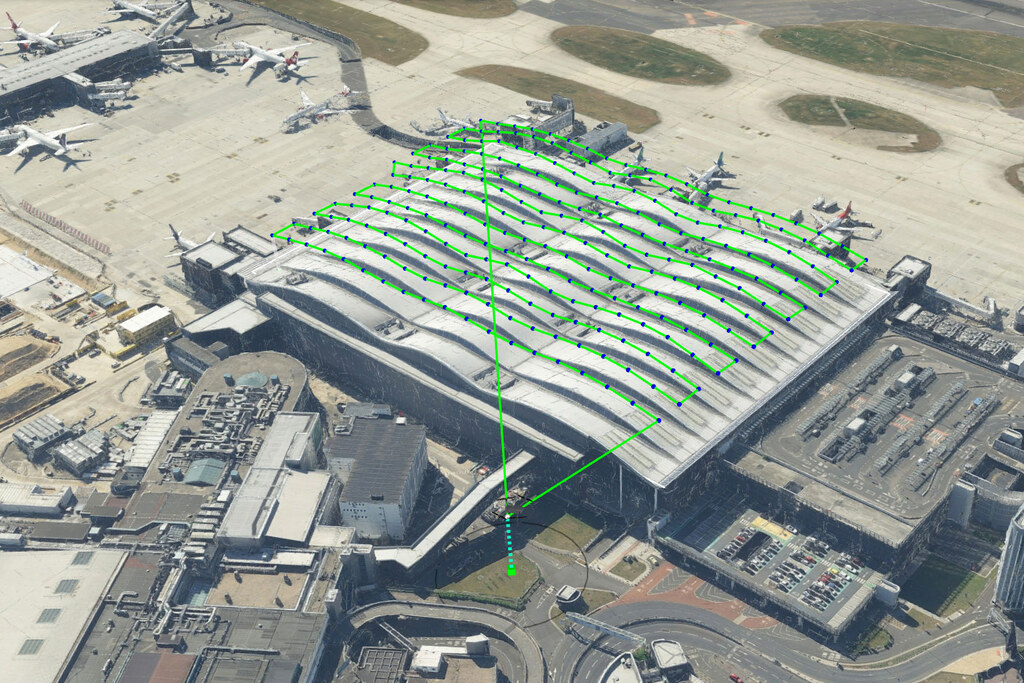
The Pattern Service is designed to generate optimized flight paths based on user-defined requirements. It offers API endpoints for parallel and rectangular pattern generation within defined boundaries, line-based pattern generation for applications like fence line inspection, and volume coverage pattern generation for 3D volumes.
The service processes user inputs such as coordinates, camera coverage specifications and image requirements to produce a list of waypoints to capture the required data. The Pattern Service aims to streamline mission planning by providing strategic flight patterns that ensure full visual coverage while maintaining line of sight and adhering to mission-specific requirements.
The patterns can optionally adjust waypoints using the built-in elevation data from the Elevation Service to ensure consistent data capture, which can be essential for applications such as photogrammetry.
The beta version of Carmenta UAS Services has UK data pre-integrated. If you are interested in using Carmenta UAS Services with other data, please reach out to us on uas.support@carmenta.com.
The 3D maps of Heathrow Airport and central London are provided by Get Mapping Inc.